3.7 KiB
3DR (mRo) Control Zero H7 OEM Flight Controller revision G
The Control Zero H7 OEM revision G is a flight controller produced by 3DR (mRo).


Features
Processor
STM32H743IIK6 32-bit Processor
Sensors
BMI088 6DOF
ICM20602 6DOF
ICM20948 9DOF
DPS368 Baro
Power
External Power Supply
Logic level at 3.3V
Interfaces
Bottom Connectors: 36pin front and 40pin back Samtec FTM-118-02-x and FTM-120-02-x
8x PWM / IO - DMA capable
1x RC Input
5x UARTs (2x with hardware flow control)
2x CAN
1x SPI
3x I2C
SWD via TC2030 header
SDCARD Socket
Memory
FRAM (256KB)
Miscellaneous
Onboard 3 color LED
Buzzer
Safety Button
Uncased Weight and Dimensions
Weight: 3.66g (13.oz) Width: 20mm (.79in) Length: 34mm (1.34in)
Case sold separately
Changelog
- M10059C - Initial Release
- M10059G adds external power supply and TCXO.
Pinout
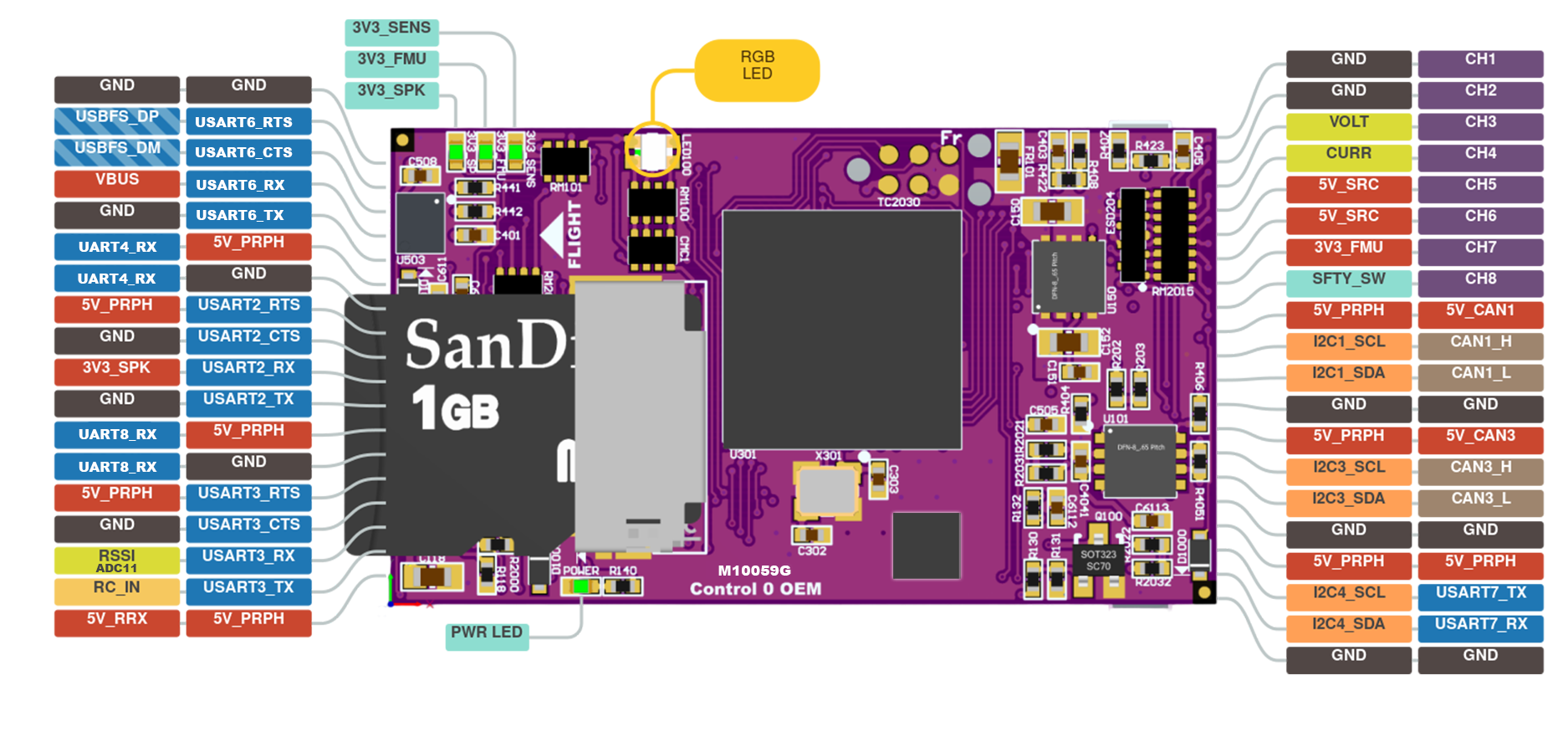
UART Mapping
-
SERIAL0 -> USB1, for GCS connection
-
SERIAL1 -> USART2 (TELEM 1) DMA Enabled
-
SERIAL2 -> USART3 (TELEM 2) DMA Enabled
-
SERIAL3 -> UART4 (GPS) DMA Enabled
-
SERIAL4 -> UART8 (GPS 2) DMA Enabled
-
SERIAL5 -> UART7 (DEBUG) DMA Enabled
-
SERIAL6 -> USART6 (Additional USART) DMA Enabled
-
SERIAL7 -> USB2, MAVLink interface
RC Input
RC input is configured on the RC_IN pin. These are the supported RC input protocols:
Spektrum DSM / DSM2 / DSM-X® Satellite compatible input and binding. Futaba S.BUS® & S.BUS2® compatible input. Graupner SUMD. Yuneec ST24.
Analog Inputs
The Control Zero H7 OEM revision G has 4 ADC inputs:
- ADC1 Pin11 -> RSSI IN
- ADC1 Pin14 -> Battery Voltage
- ADC1 Pin15 -> Battery Current
- ADC1 Pin18 -> 5V Sensor
PWM Output
The Control Zero H7 OEM revision G supports up to 8 PWM outputs. All DShot and BiDirDShot capable.
The PWM outputs are distributed in 3 groups:
- PWM 1-4 in group 1
- PWM 5-6 in group 4
- PWM 7-8 in group 8
Channels within the same group must use only one output rate. If any channel is using DShot or BiDirDShot the rest of the group will use the said output type.
Power Supply
This board requires a 5V, 1 Amps power supply.
Battery Monitoring
This board has a built-in voltage and current sensors. The following settings need to be present already on the board to work with a Power Zero Module (M10077):
- BATT_MONITOR 4
- BATT_VOLT_PIN 14
- BATT_CURR_PIN 15
- BATT_VOLT_SCALE 15.3
- BATT_CURR_SCALE 50.0
Other Power Module needs to be adjusted accordingly
Build
./waf configure --board=3DRControlZeroG
./waf copter (check ArduPilot's docs for more info about the available targets)
The compiled binary will be located in build/3DRControlZeroG/bin/arducopter.apj.
Uploading Firmware
Any Control Zero H7 OEM revision G has a preloaded Ardupilot bootloader, which allows the user to use a compatible Ground Station software to upload the .apj file.