forked from Archive/PX4-Autopilot
Remove trailing whitespaces and trailing duplicate newlines
This commit is contained in:
parent
d8d2213cab
commit
4c0b6dbe86
|
|
@ -31,4 +31,3 @@ bool mode_req_manual_control
|
||||||
|
|
||||||
|
|
||||||
uint8 ORB_QUEUE_LENGTH = 4
|
uint8 ORB_QUEUE_LENGTH = 4
|
||||||
|
|
||||||
|
|
|
||||||
|
|
@ -3,5 +3,3 @@ uint64 timestamp # time since system start (microseconds)
|
||||||
# broadcast message to request all registered arming checks to be reported
|
# broadcast message to request all registered arming checks to be reported
|
||||||
|
|
||||||
uint8 request_id
|
uint8 request_id
|
||||||
|
|
||||||
|
|
||||||
|
|
|
||||||
|
|
@ -16,4 +16,3 @@ uint8 source_id # ID depending on source_type
|
||||||
uint8 ORB_QUEUE_LENGTH = 4
|
uint8 ORB_QUEUE_LENGTH = 4
|
||||||
|
|
||||||
# TOPICS config_overrides config_overrides_request
|
# TOPICS config_overrides config_overrides_request
|
||||||
|
|
||||||
|
|
|
||||||
|
|
@ -22,4 +22,3 @@ float32 max_vertical_speed # (optional) [m/s] maximum speed (absolute) in the D-
|
||||||
|
|
||||||
bool flag_set_max_heading_rate # true if setting a non-default heading rate limit
|
bool flag_set_max_heading_rate # true if setting a non-default heading rate limit
|
||||||
float32 max_heading_rate # (optional) [rad/s] maximum heading rate (absolute)
|
float32 max_heading_rate # (optional) [rad/s] maximum heading rate (absolute)
|
||||||
|
|
||||||
|
|
|
||||||
|
|
@ -7,4 +7,3 @@ uint16 LATEST_PROTOCOL_VERSION = 1 # Current version of this protocol. Increase
|
||||||
uint16 protocol_version # Must be set to LATEST_PROTOCOL_VERSION. Do not change this field, it must be the first field after the timestamp
|
uint16 protocol_version # Must be set to LATEST_PROTOCOL_VERSION. Do not change this field, it must be the first field after the timestamp
|
||||||
|
|
||||||
char[50] topic_name # E.g. /fmu/in/vehicle_command
|
char[50] topic_name # E.g. /fmu/in/vehicle_command
|
||||||
|
|
||||||
|
|
|
||||||
|
|
@ -11,4 +11,3 @@ int8 mode_id # assigned mode ID (-1 if invalid)
|
||||||
int8 mode_executor_id # assigned mode executor ID (-1 if invalid)
|
int8 mode_executor_id # assigned mode executor ID (-1 if invalid)
|
||||||
|
|
||||||
uint8 ORB_QUEUE_LENGTH = 2
|
uint8 ORB_QUEUE_LENGTH = 2
|
||||||
|
|
||||||
|
|
|
||||||
|
|
@ -5,6 +5,3 @@ char[25] name # either the mode name, or component name
|
||||||
int8 arming_check_id # arming check registration ID (-1 if not registered)
|
int8 arming_check_id # arming check registration ID (-1 if not registered)
|
||||||
int8 mode_id # assigned mode ID (-1 if not registered)
|
int8 mode_id # assigned mode ID (-1 if not registered)
|
||||||
int8 mode_executor_id # assigned mode executor ID (-1 if not registered)
|
int8 mode_executor_id # assigned mode executor ID (-1 if not registered)
|
||||||
|
|
||||||
|
|
||||||
|
|
||||||
|
|
|
||||||
|
|
@ -3,5 +3,3 @@ menuconfig DRIVERS_BAROMETER_INVENSENSE_ICP10100
|
||||||
default n
|
default n
|
||||||
---help---
|
---help---
|
||||||
Enable support for icp10100
|
Enable support for icp10100
|
||||||
|
|
||||||
|
|
||||||
|
|
|
||||||
|
|
@ -39,8 +39,6 @@
|
||||||
*@author Denislav Petrov <denislavamitoba@gmail.com>
|
*@author Denislav Petrov <denislavamitoba@gmail.com>
|
||||||
*/
|
*/
|
||||||
|
|
||||||
|
|
||||||
|
|
||||||
#include "ASP5033.hpp"
|
#include "ASP5033.hpp"
|
||||||
|
|
||||||
ASP5033::ASP5033(const I2CSPIDriverConfig &config) :
|
ASP5033::ASP5033(const I2CSPIDriverConfig &config) :
|
||||||
|
|
@ -80,9 +78,6 @@ int ASP5033::sensor_id_check()
|
||||||
if ((transfer(&cmd_3, 1, &id[0], sizeof(id)) != PX4_OK) || (*id != REG_WHOAMI_RECHECK_ID_ASP5033)) { return 0; }
|
if ((transfer(&cmd_3, 1, &id[0], sizeof(id)) != PX4_OK) || (*id != REG_WHOAMI_RECHECK_ID_ASP5033)) { return 0; }
|
||||||
|
|
||||||
return 1;
|
return 1;
|
||||||
|
|
||||||
|
|
||||||
|
|
||||||
}
|
}
|
||||||
|
|
||||||
int ASP5033::init()
|
int ASP5033::init()
|
||||||
|
|
@ -123,13 +118,11 @@ bool ASP5033::get_differential_pressure()
|
||||||
press_sum = 0.;
|
press_sum = 0.;
|
||||||
press_count = 0;
|
press_count = 0;
|
||||||
return true;
|
return true;
|
||||||
|
|
||||||
}
|
}
|
||||||
|
|
||||||
|
|
||||||
void ASP5033::print_status()
|
void ASP5033::print_status()
|
||||||
{
|
{
|
||||||
|
|
||||||
I2CSPIDriverBase::print_status();
|
I2CSPIDriverBase::print_status();
|
||||||
|
|
||||||
perf_print_counter(_sample_perf);
|
perf_print_counter(_sample_perf);
|
||||||
|
|
@ -209,7 +202,6 @@ int ASP5033::collect()
|
||||||
perf_begin(_sample_perf);
|
perf_begin(_sample_perf);
|
||||||
const hrt_abstime timestamp_sample = hrt_absolute_time();
|
const hrt_abstime timestamp_sample = hrt_absolute_time();
|
||||||
|
|
||||||
|
|
||||||
// Read pressure and temperature as one block
|
// Read pressure and temperature as one block
|
||||||
uint8_t val[5] {0, 0, 0, 0, 0};
|
uint8_t val[5] {0, 0, 0, 0, 0};
|
||||||
uint8_t cmd = REG_PRESS_DATA_ASP5033;
|
uint8_t cmd = REG_PRESS_DATA_ASP5033;
|
||||||
|
|
@ -251,8 +243,3 @@ int ASP5033::collect()
|
||||||
|
|
||||||
return PX4_OK;
|
return PX4_OK;
|
||||||
}
|
}
|
||||||
|
|
||||||
|
|
||||||
|
|
||||||
|
|
||||||
|
|
||||||
|
|
|
||||||
|
|
@ -31,7 +31,6 @@
|
||||||
*
|
*
|
||||||
****************************************************************************/
|
****************************************************************************/
|
||||||
|
|
||||||
|
|
||||||
/**
|
/**
|
||||||
* ASP5033 differential pressure sensor (external I2C)
|
* ASP5033 differential pressure sensor (external I2C)
|
||||||
*
|
*
|
||||||
|
|
@ -40,7 +39,3 @@
|
||||||
* @boolean
|
* @boolean
|
||||||
*/
|
*/
|
||||||
PARAM_DEFINE_INT32(SENS_EN_ASP5033, 0);
|
PARAM_DEFINE_INT32(SENS_EN_ASP5033, 0);
|
||||||
|
|
||||||
|
|
||||||
|
|
||||||
|
|
||||||
|
|
|
||||||
|
|
@ -40,4 +40,3 @@ px4_add_module(
|
||||||
MODULE_CONFIG
|
MODULE_CONFIG
|
||||||
module.yaml
|
module.yaml
|
||||||
)
|
)
|
||||||
|
|
||||||
|
|
|
||||||
|
|
@ -235,5 +235,3 @@ int matlab_csv_serial_thread_main(int argc, char *argv[])
|
||||||
fflush(stdout);
|
fflush(stdout);
|
||||||
return 0;
|
return 0;
|
||||||
}
|
}
|
||||||
|
|
||||||
|
|
||||||
|
|
|
||||||
|
|
@ -58,5 +58,3 @@ with open(filename, 'w') as outfile:
|
||||||
|
|
||||||
|
|
||||||
outfile.write("}\n")
|
outfile.write("}\n")
|
||||||
|
|
||||||
|
|
||||||
|
|
|
||||||
|
|
@ -30,6 +30,7 @@
|
||||||
# POSSIBILITY OF SUCH DAMAGE.
|
# POSSIBILITY OF SUCH DAMAGE.
|
||||||
#
|
#
|
||||||
############################################################################
|
############################################################################
|
||||||
|
|
||||||
px4_add_module(
|
px4_add_module(
|
||||||
MODULE lib__controllib__controllib_test
|
MODULE lib__controllib__controllib_test
|
||||||
MAIN controllib_test
|
MAIN controllib_test
|
||||||
|
|
@ -39,5 +40,3 @@ px4_add_module(
|
||||||
controllib_test_main.cpp
|
controllib_test_main.cpp
|
||||||
DEPENDS
|
DEPENDS
|
||||||
)
|
)
|
||||||
|
|
||||||
|
|
||||||
|
|
|
||||||
|
|
@ -134,5 +134,3 @@ void __EXPORT float2SigExp(const float &num, float &sig, int &exp)
|
||||||
for (int i = 0; i < abs(exp); i++) { sig *= 10; }
|
for (int i = 0; i < abs(exp); i++) { sig *= 10; }
|
||||||
}
|
}
|
||||||
}
|
}
|
||||||
|
|
||||||
|
|
||||||
|
|
|
||||||
|
|
@ -53,7 +53,6 @@
|
||||||
#include "err.h" // warnx
|
#include "err.h" // warnx
|
||||||
#include <assert.h>
|
#include <assert.h>
|
||||||
|
|
||||||
|
|
||||||
int val_read(void *dest, volatile const void *src, int bytes)
|
int val_read(void *dest, volatile const void *src, int bytes)
|
||||||
{
|
{
|
||||||
|
|
||||||
|
|
@ -144,8 +143,6 @@ int lock_otp(void)
|
||||||
return errors;
|
return errors;
|
||||||
}
|
}
|
||||||
|
|
||||||
|
|
||||||
|
|
||||||
// COMPLETE, BUSY, or other flash error?
|
// COMPLETE, BUSY, or other flash error?
|
||||||
static int F_GetStatus(void)
|
static int F_GetStatus(void)
|
||||||
{
|
{
|
||||||
|
|
@ -177,7 +174,7 @@ void F_unlock(void)
|
||||||
}
|
}
|
||||||
}
|
}
|
||||||
|
|
||||||
// lock the FLASH Registers
|
// lock the FLASH Registers
|
||||||
void F_lock(void)
|
void F_lock(void)
|
||||||
{
|
{
|
||||||
FLASH->control |= F_CR_LOCK;
|
FLASH->control |= F_CR_LOCK;
|
||||||
|
|
@ -233,6 +230,3 @@ int F_write_byte(unsigned long Address, uint8_t Data)
|
||||||
//Return the Program Status
|
//Return the Program Status
|
||||||
return !(status == F_COMPLETE);
|
return !(status == F_COMPLETE);
|
||||||
}
|
}
|
||||||
|
|
||||||
|
|
||||||
|
|
||||||
|
|
|
||||||
|
|
@ -134,5 +134,3 @@ static constexpr float WMM_STRENGTH_MIN_GS = 22.2; // latitude: -30, longitude:
|
||||||
static constexpr float WMM_STRENGTH_MAX_GS = 66.9; // latitude: -60, longitude: 140
|
static constexpr float WMM_STRENGTH_MAX_GS = 66.9; // latitude: -60, longitude: 140
|
||||||
static constexpr float WMM_STRENGTH_MEAN_GS = 46.4;
|
static constexpr float WMM_STRENGTH_MEAN_GS = 46.4;
|
||||||
static constexpr float WMM_STRENGTH_MEDIAN_GS = 48.8;
|
static constexpr float WMM_STRENGTH_MEDIAN_GS = 48.8;
|
||||||
|
|
||||||
|
|
||||||
|
|
|
||||||
|
|
@ -332,4 +332,3 @@ void ExternalChecks::checkNonRegisteredModes(const Context &context, Report &rep
|
||||||
events::Log::Error, "Mode is not registered");
|
events::Log::Error, "Mode is not registered");
|
||||||
}
|
}
|
||||||
}
|
}
|
||||||
|
|
||||||
|
|
|
||||||
|
|
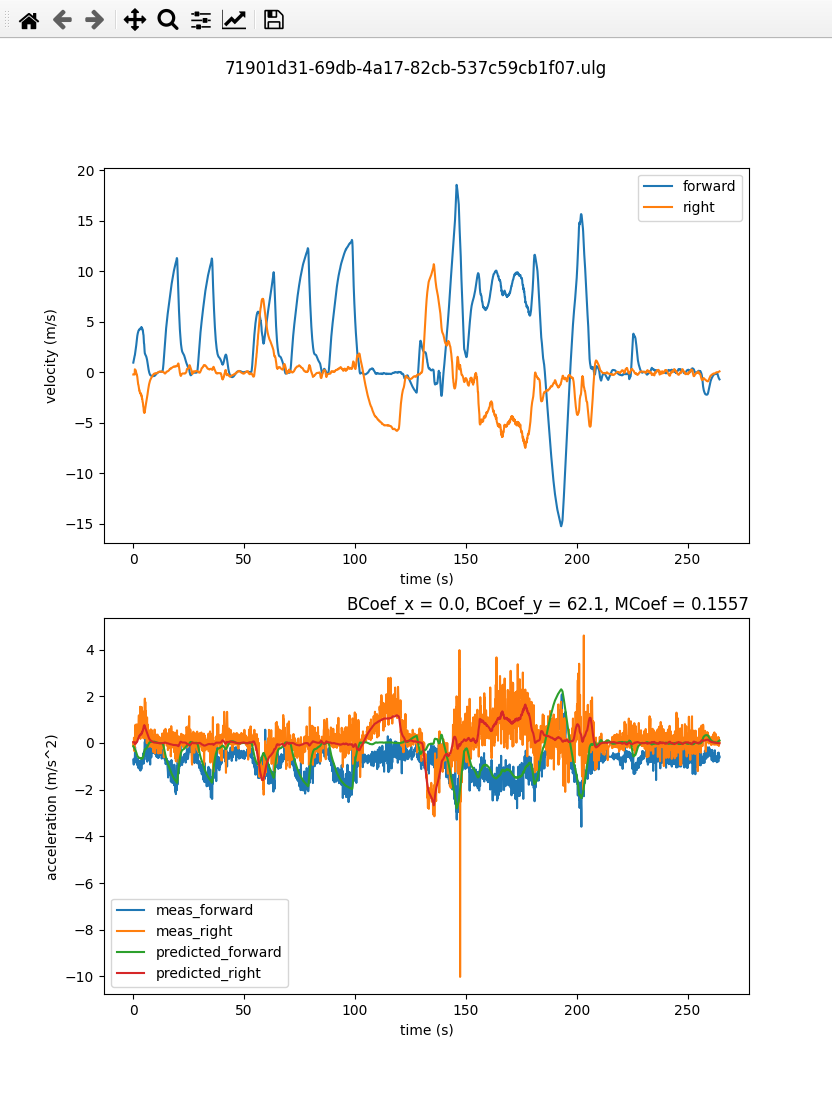
@ -34,6 +34,6 @@ param set EKF2_BCOEF_Y 62.1
|
||||||
param set EKF2_MCOEF 0.16
|
param set EKF2_MCOEF 0.16
|
||||||
|
|
||||||
# EXPERIMENTAL
|
# EXPERIMENTAL
|
||||||
param set EKF2_DRAG_NOISE 0.31
|
param set EKF2_DRAG_NOISE 0.31
|
||||||
```
|
```
|
||||||
|

|
||||||
|
|
|
||||||
|
|
@ -98,7 +98,6 @@ IOController::IOController(const char *name, const px4::wq_config_t &config) :
|
||||||
|
|
||||||
void IOController::Run()
|
void IOController::Run()
|
||||||
{
|
{
|
||||||
|
|
||||||
actuator_outputs_s actuator_outputs;
|
actuator_outputs_s actuator_outputs;
|
||||||
|
|
||||||
while (_actuator_outputs_sub.update(&actuator_outputs)) {
|
while (_actuator_outputs_sub.update(&actuator_outputs)) {
|
||||||
|
|
@ -118,8 +117,5 @@ void IOController::Run()
|
||||||
up_pwm_update(i);
|
up_pwm_update(i);
|
||||||
}
|
}
|
||||||
}
|
}
|
||||||
|
|
||||||
}
|
}
|
||||||
|
|
||||||
|
|
||||||
}
|
}
|
||||||
|
|
|
||||||
Loading…
Reference in New Issue