mirror of https://github.com/ArduPilot/ardupilot
this makes use of DRefs to greatly improve XPlane support. It only supports XPlane 11 and later The key change is the use of a JSON file to map ArduPilot output channels to DataRefs, and map raw joystick inputs to RC inputs this gets rid of the awful throttle hack handling, and allows for control of a much wider range of aircraft |
||
|---|---|---|
| .. | ||
| Battery_example_plots.png | ||
| EvaluateBatteryModel.cpp | ||
| README.md | ||
| wscript | ||
{kind=link}
README.md
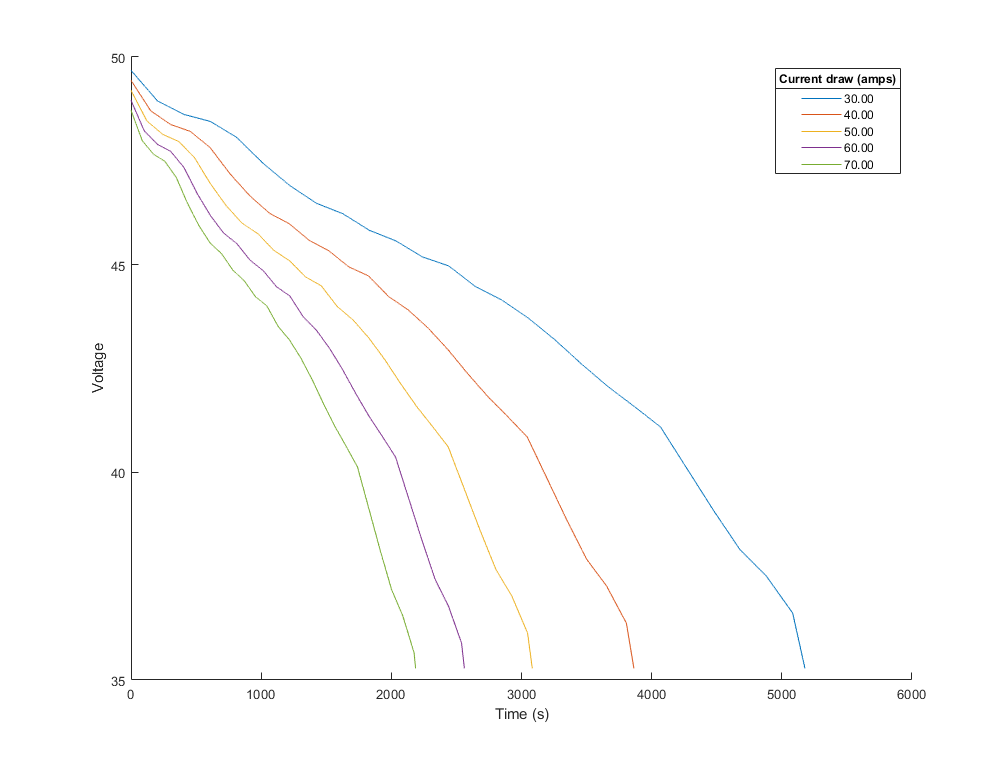
Testing SITL battery model
This example allows the built in battery model to be evaluated. The battery is defined by the parameters in a json configuration file, such as this one.
The example only works with the linux target. Configure and build with:
./waf configure --board linux
./waf build --targets examples/EvaluateBatteryModel
The example can then be run, the first argument is the path to the json model definition. The second is the constant current draw to apply.
The command:
./build/linux/examples/EvaluateBatteryModel Tools/autotest/models/Callisto.json 50
Gives the output:
Loading model Tools/autotest/models/Callisto.json
Loaded model params from Tools/autotest/models/Callisto.json
Simulating 50.40v, 44.00 ah battery with resistance of 0.024000
Voltage from 50.40 to 35.28 with constant current draw of 50.00
time, voltage
0.00, 49.20
0.05, 49.20
0.10, 49.20
0.15, 49.20
0.20, 49.20
0.25, 49.20
0.30, 49.20
....
...
This can be output re-directed to a file with:
./build/linux/examples/EvaluateBatteryModel Tools/autotest/models/Callisto.json 50 >> battery_test.csv
The data can then be compared to real battery data and the model definition changed to better represent the vehicle being modelled.