these have been merged with bad lines in them |
||
|---|---|---|
| .. | ||
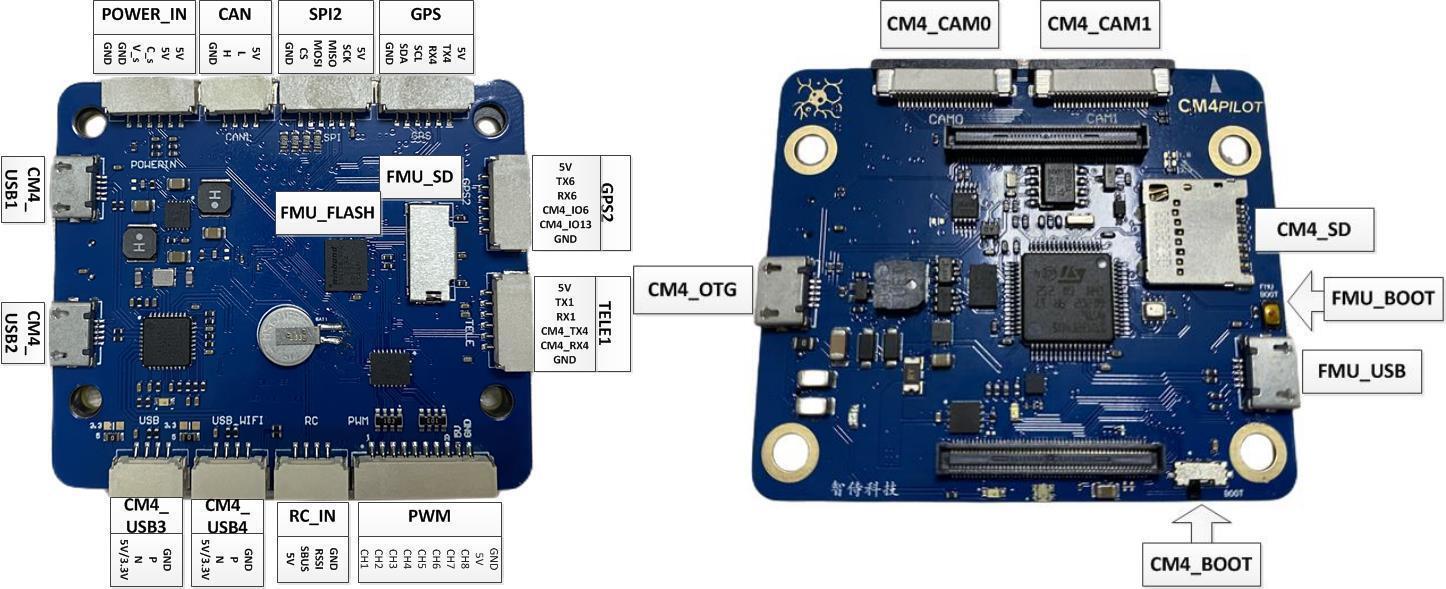
| CM4Pilot_Pinout.jpg | ||
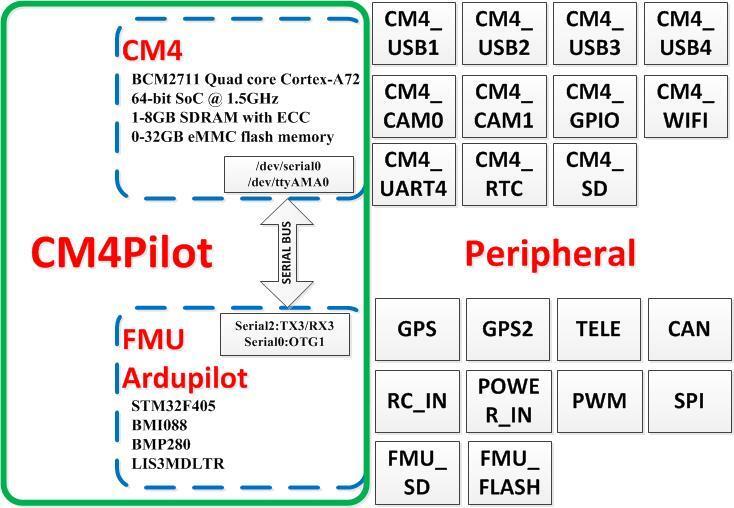
| CM4Pilot_structure.jpg | ||
| CM4pilot_inshell.jpg | ||
| CM4pilot_size.jpg | ||
| README.md | ||
| hwdef-bl.dat | ||
| hwdef.dat | ||
{kind=link}
{kind=link}
{kind=link}
{kind=link}
README.md
CM4PILOT Integrated Flight Controller
The CM4PILOT is a low-cost and compact flight controller which integrated a Raspberry Pi CM4 in the cockpit.

Features
- Raspberry Pi CM4 + Ardupilot, Companion Computers in cockpit structure
- Small Footprint and Lightweight, 58mm X 50mm X 18mm,26g(without shell)
- Broadcom BCM2711, quad-core Cortex-A72 (ARM v8) 64-bit SoC @ 1.5GHz
- STM32F405 microcontroller
- IMU: BMI088
- Mag: LIS3MDLTR
- Baro: BMP280
- RTC: PCF85063
- 2 2-lane MIPI CSI camera ports
- 2 microSD card slot port
- 1 power ports(Analog)
- 6 UARTs and USB ports for FMU
- 2 UARTs and 4 USB2.0 and 1 OTG for CM4
- 1 I2C port
- 1 CAN port
- 1 SBUS input and 8 PWM output (all support DShot)
- External SPI port
- Buzzer on board
- RBG LED on board
- 128M flash on board for logging
UART Mapping
- SERIAL0 -> USB(OTG1)
- SERIAL1 -> USART1(Telem1)(DMA capable)
- SERIAL2 -> USART3 (CM4)(DMA capable)
- SERIAL3 -> UART4 (GPS)(DMA capable)
- SERIAL4 -> UART6 (GPS2)(DMA capable)
- SERIAL5 -> USART2 (SBUS)(RC input, no DMA capable)
RC Input
RC input is configured on the SBUS pin (UART2_RX). It supports all RC protocols except serial protocols
PWM Output
The CM4PILOT supports up to 8 PWM outputs. All outputs support DShot (No BDshot). The PWM is in 4 groups:
- PWM 1~4 in group1
- PWM 5,6 in group2
- PWM 7,8 in group3
- Buzzer on board in group4
GPIOs
All 8 PWM channels can be used for GPIO functions. The pin numbers for these PWM channels in ArduPilot are shown below:
| PWM Channels | Pin | PWM Channels | Pin |
|---|---|---|---|
| PWM1 | 50 | PWM8 | 57 |
| PWM2 | 51 | ||
| PWM3 | 52 | ||
| PWM4 | 53 | ||
| PWM5 | 54 | ||
| PWM6 | 55 | ||
| PWM7 | 56 |
Battery Monitoring
The correct battery setting parameters are set by default and are:
- BATT_MONITOR 4
- BATT_VOLT_PIN 11
- BATT_CURR_PIN 12
- BATT_VOLT_SCALE 10.1
- BATT_CURR_SCALE 17.0
Compass
The CM4PILOT has one built-in compass LIS3MDLTR, you can also attach an external compass using I2C on the SDA and SCL pads.
Loading Firmware
Firmware for these boards can be found at https://firmware.ardupilot.org in sub-folders labeled “ACNS-CM4PILOT”.
Initial firmware load can be done with DFU by plugging in USB with the boot button pressed. Then you should load the "xxx_bl.hex" firmware, using your favorite DFU loading tool.
Subsequently, you can update the firmware with Mission Planner.
Pinout and Size