mirror of https://github.com/ArduPilot/ardupilot
AP_HAL_ChibiOS: Support for 3DR Control Zero H7 OEM rev G
Co-authored-by: Alexis Guijarro <totonzx@gmail.com> Co-authored-by: Andy Piper <github@andypiper.com>
This commit is contained in:
parent
0f0023e62d
commit
763193d4fc
|
|
@ -0,0 +1,130 @@
|
|||
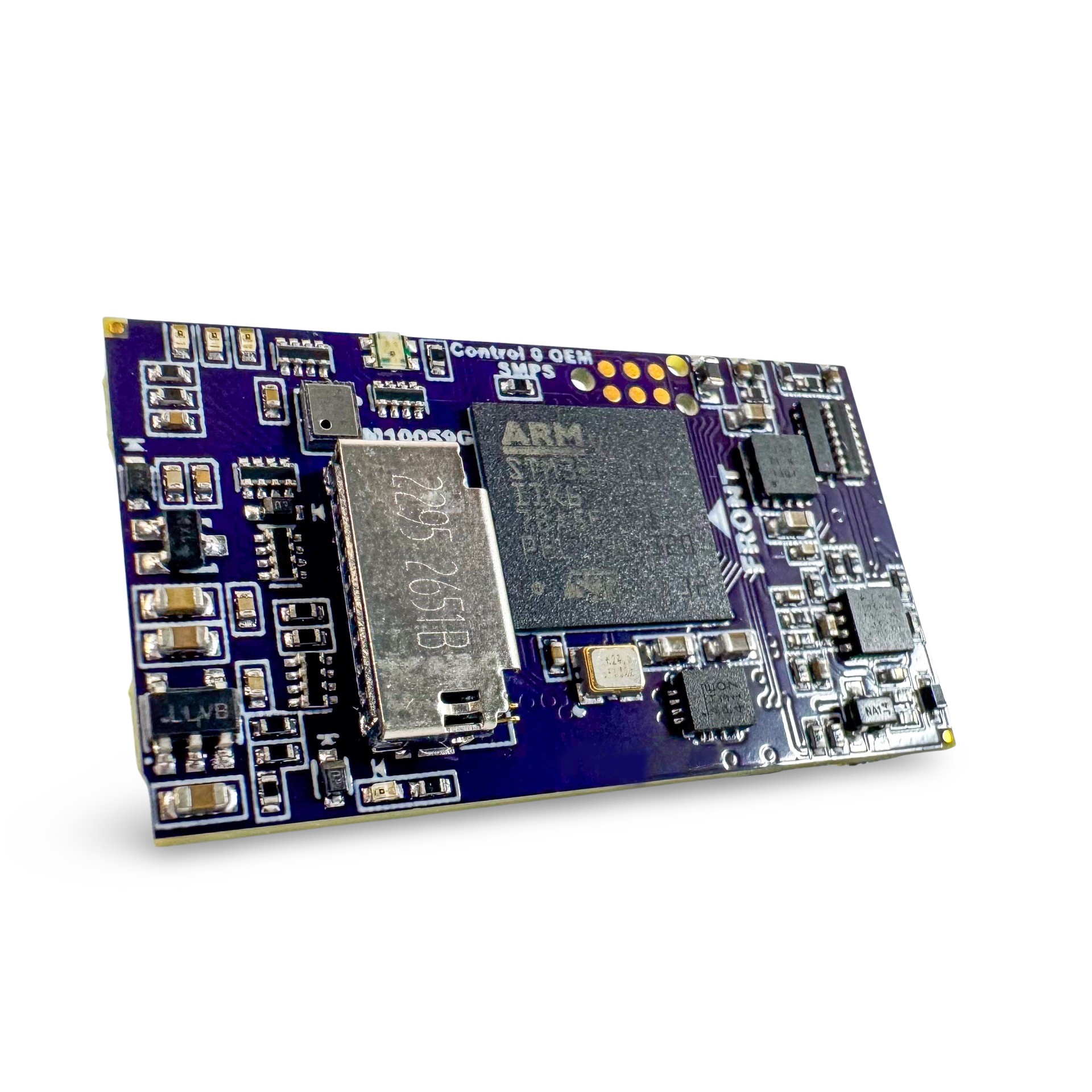
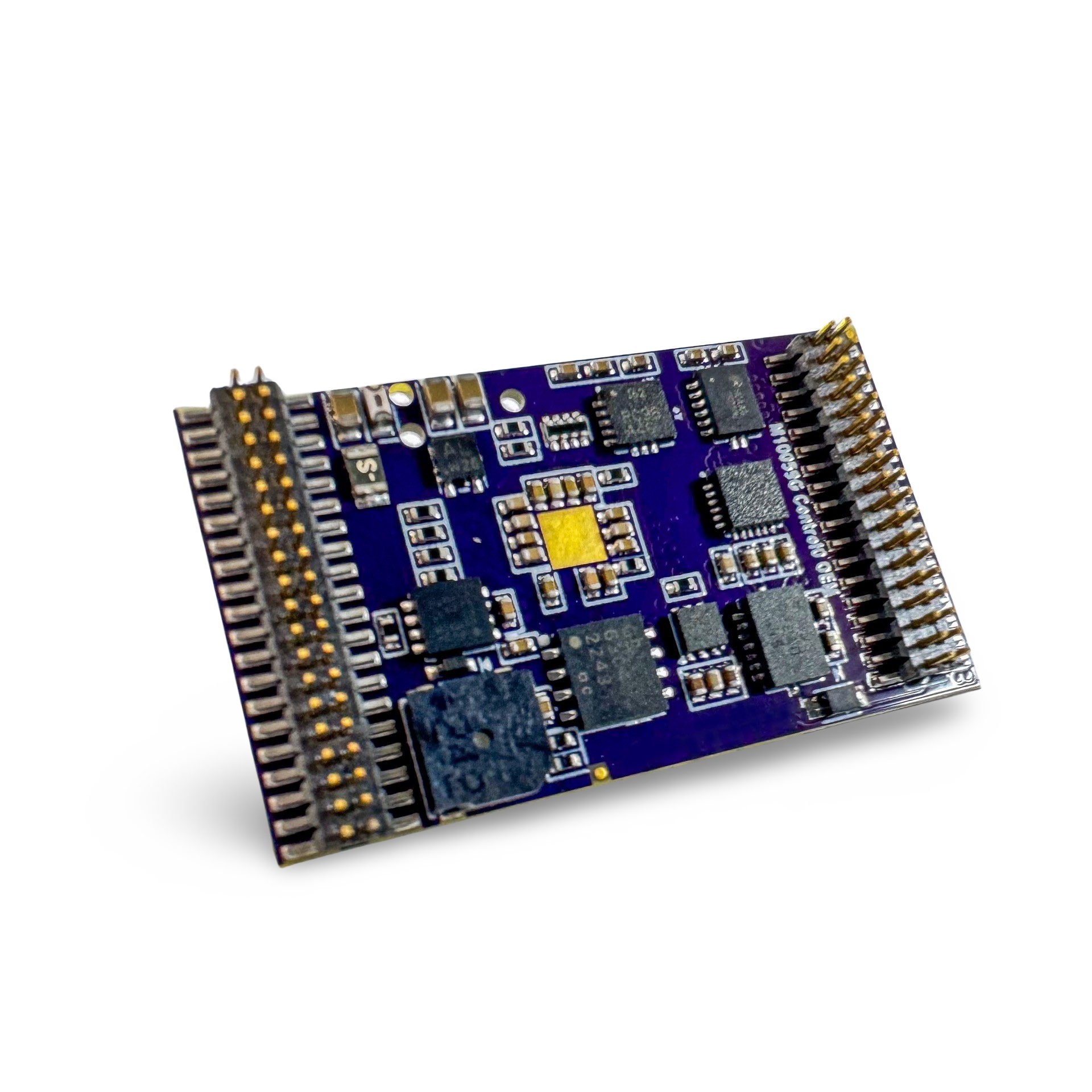
# 3DR (mRo) Control Zero H7 OEM Flight Controller revision G
|
||||
|
||||
The Control Zero H7 OEM revision G is a flight controller produced by [3DR (mRo)](https://store.3dr.com/control-zero-h7-oem-g/).
|
||||
|
||||
|
||||
|
||||

|
||||

|
||||
|
||||
## Features
|
||||
|
||||
Processor
|
||||
STM32H743IIK6 32-bit Processor
|
||||
Sensors
|
||||
BMI088 6DOF
|
||||
ICM20602 6DOF
|
||||
ICM20948 9DOF
|
||||
DPS368 Baro
|
||||
Power
|
||||
External Power Supply
|
||||
Logic level at 3.3V
|
||||
Interfaces
|
||||
Bottom Connectors: 36pin front and 40pin back Samtec FTM-118-02-x and FTM-120-02-x
|
||||
8x PWM / IO - DMA capable
|
||||
1x RC Input
|
||||
5x UARTs (2x with hardware flow control)
|
||||
2x CAN
|
||||
1x SPI
|
||||
3x I2C
|
||||
SWD via TC2030 header
|
||||
SDCARD Socket
|
||||
Memory
|
||||
FRAM (256KB)
|
||||
Miscellaneous
|
||||
Onboard 3 color LED
|
||||
Buzzer
|
||||
Safety Button
|
||||
|
||||
|
||||
### Uncased Weight and Dimensions
|
||||
|
||||
Weight: 3.66g (13.oz)
|
||||
Width: 20mm (.79in)
|
||||
Length: 34mm (1.34in)
|
||||
|
||||
*Case sold separately*
|
||||
|
||||
## Changelog
|
||||
|
||||
- M10059C - Initial Release
|
||||
- M10059G adds external power supply and TCXO.
|
||||
|
||||
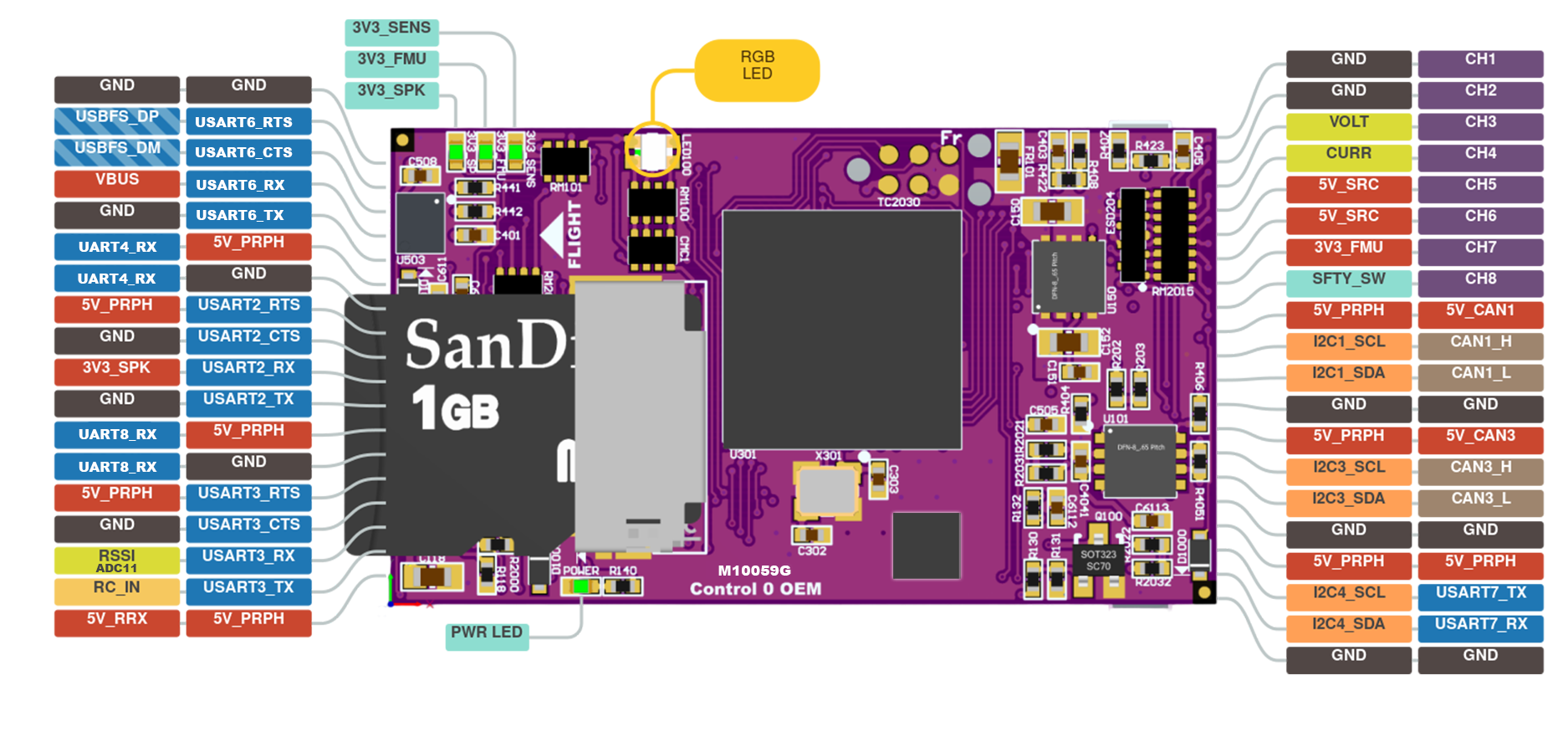
## Pinout
|
||||
|
||||
|
||||
|
||||
## UART Mapping
|
||||
|
||||
- SERIAL0 -> USB1, for GCS connection
|
||||
|
||||
- SERIAL1 -> USART2 (TELEM 1) DMA Enabled
|
||||
|
||||
- SERIAL2 -> USART3 (TELEM 2) DMA Enabled
|
||||
|
||||
- SERIAL3 -> UART4 (GPS) DMA Enabled
|
||||
|
||||
- SERIAL4 -> UART8 (GPS 2) DMA Enabled
|
||||
|
||||
- SERIAL5 -> UART7 (DEBUG) DMA Enabled
|
||||
|
||||
- SERIAL6 -> USART6 (Additional USART) DMA Enabled
|
||||
|
||||
- SERIAL7 -> USB2, MAVLink interface
|
||||
|
||||
## RC Input
|
||||
|
||||
RC input is configured on the RC_IN pin. These are the supported RC input protocols:
|
||||
|
||||
Spektrum DSM / DSM2 / DSM-X® Satellite compatible input and binding.
|
||||
Futaba S.BUS® & S.BUS2® compatible input.
|
||||
Graupner SUMD. Yuneec ST24.
|
||||
|
||||
## Analog Inputs
|
||||
|
||||
The Control Zero H7 OEM revision G has 4 ADC inputs:
|
||||
|
||||
- ADC1 Pin11 -> RSSI IN
|
||||
- ADC1 Pin14 -> Battery Voltage
|
||||
- ADC1 Pin15 -> Battery Current
|
||||
- ADC1 Pin18 -> 5V Sensor
|
||||
|
||||
## PWM Output
|
||||
|
||||
The Control Zero H7 OEM revision G supports up to 8 PWM outputs. All DShot and BiDirDShot capable.
|
||||
|
||||
The PWM outputs are distributed in 3 groups:
|
||||
|
||||
- PWM 1-4 in group 1
|
||||
- PWM 5-6 in group 4
|
||||
- PWM 7-8 in group 8
|
||||
|
||||
Channels within the same group must use only one output rate. If any channel is using DShot or BiDirDShot the rest of the group will use the said output type.
|
||||
|
||||
## Power Supply
|
||||
|
||||
This board requires a 5V, 1 Amps power supply.
|
||||
|
||||
## Battery Monitoring
|
||||
|
||||
This board has a built-in voltage and current sensors. The following settings need to be present already on the board to work with a Power Zero Module (M10077):
|
||||
|
||||
- BATT_MONITOR 4
|
||||
- BATT_VOLT_PIN 14
|
||||
- BATT_CURR_PIN 15
|
||||
- BATT_VOLT_SCALE 15.3
|
||||
- BATT_CURR_SCALE 50.0
|
||||
|
||||
*Other Power Module needs to be adjusted accordingly*
|
||||
|
||||
## Build
|
||||
|
||||
`./waf configure --board=3DRControlZeroG`
|
||||
|
||||
`./waf copter` (check ArduPilot's docs for more info about the available targets)
|
||||
|
||||
The compiled binary will be located in `build/3DRControlZeroG/bin/arducopter.apj`.
|
||||
|
||||
## Uploading Firmware
|
||||
|
||||
Any Control Zero H7 OEM revision G has a preloaded Ardupilot bootloader, which allows the user to use a compatible Ground Station software to upload the `.apj` file.
|
||||
|
|
@ -0,0 +1,4 @@
|
|||
#Default Parameters for the mRo Control Zero OEM H7
|
||||
|
||||
CAN_P1_DRIVER 1
|
||||
CAN_P2_DRIVER 2
|
||||
|
|
@ -0,0 +1,58 @@
|
|||
# MCU class and specific type
|
||||
MCU STM32H7xx STM32H743xx
|
||||
|
||||
# USB setup
|
||||
USB_VENDOR 0x26ac
|
||||
USB_PRODUCT 0x1124
|
||||
USB_STRING_MANUFACTURER "3DR"
|
||||
USB_STRING_PRODUCT "CZOEMrevG"
|
||||
|
||||
# crystal frequency
|
||||
OSCILLATOR_HZ 24000000
|
||||
define STM32_HSE_BYPASS
|
||||
define SMPS_EXT
|
||||
|
||||
# board ID for firmware load
|
||||
APJ_BOARD_ID 1124
|
||||
|
||||
FLASH_SIZE_KB 2048
|
||||
|
||||
# bootloader is installed at zero offset
|
||||
FLASH_RESERVE_START_KB 0
|
||||
|
||||
# the location where the bootloader will put the firmware
|
||||
FLASH_BOOTLOADER_LOAD_KB 128
|
||||
|
||||
PB11 LED_BOOTLOADER OUTPUT
|
||||
|
||||
PH5 VDD_1V2_CORE_EN OUTPUT HIGH
|
||||
|
||||
# define all 3 to make LED output White.
|
||||
PB1 LED_ACTIVITY OUTPUT
|
||||
PB3 LED_ACTIVITY2 OUTPUT
|
||||
# PB11 LED_ACTIVITY3 OUTPUT
|
||||
|
||||
define HAL_LED_ON 0
|
||||
|
||||
# order of UARTs (and USB)
|
||||
SERIAL_ORDER OTG1 USART2
|
||||
|
||||
PD5 USART2_TX USART2
|
||||
PD6 USART2_RX USART2
|
||||
PD3 USART2_CTS USART2
|
||||
PD4 USART2_RTS USART2
|
||||
|
||||
PA11 OTG_FS_DM OTG1
|
||||
PA12 OTG_FS_DP OTG1
|
||||
|
||||
PA13 JTMS-SWDIO SWD
|
||||
PA14 JTCK-SWCLK SWD
|
||||
|
||||
# Add CS pins to ensure they are high in bootloader
|
||||
PC2 ICM_20602_CS CS
|
||||
PD7 BARO_CS CS
|
||||
PD10 FRAM_CS CS SPEED_VERYLOW NODMA
|
||||
PE15 ICM_20948_CS CS
|
||||
PF6 BMI088_ACCEL_CS CS
|
||||
PF10 BMI088_GYRO_CS CS
|
||||
#PG9 EXTERNAL CS
|
||||
|
|
@ -0,0 +1,266 @@
|
|||
# MCU class and specific type
|
||||
MCU STM32H7xx STM32H743xx
|
||||
|
||||
# board ID for firmware load
|
||||
APJ_BOARD_ID 1124
|
||||
|
||||
# crystal frequency
|
||||
OSCILLATOR_HZ 24000000
|
||||
define STM32_HSE_BYPASS
|
||||
define SMPS_EXT
|
||||
|
||||
FLASH_SIZE_KB 2048
|
||||
|
||||
# with 2M flash we can afford to optimize for speed
|
||||
env OPTIMIZE -O2
|
||||
|
||||
# start on 2th sector (1st sector for bootloader)
|
||||
FLASH_RESERVE_START_KB 128
|
||||
|
||||
define HAL_STORAGE_SIZE 32768
|
||||
|
||||
# USB setup
|
||||
USB_VENDOR 0x26ac
|
||||
USB_PRODUCT 0x1124
|
||||
USB_STRING_MANUFACTURER "3DR"
|
||||
USB_STRING_PRODUCT "CZOEMrevG"
|
||||
|
||||
PA8 RCC_MCO_1 OUTPUT LOW
|
||||
|
||||
PH5 VDD_1V2_CORE_EN OUTPUT HIGH
|
||||
|
||||
# RC Input set for Interrupt not DMA
|
||||
PC7 TIM3_CH2 TIM3 RCININT PULLDOWN LOW
|
||||
|
||||
# GPIO(70) # also USART6_RX for serial RC
|
||||
|
||||
# Control of Spektrum power pin
|
||||
PE4 SPEKTRUM_PWR OUTPUT LOW GPIO(70)
|
||||
define HAL_GPIO_SPEKTRUM_PWR 70
|
||||
|
||||
# Spektrum Power is Active High
|
||||
define HAL_SPEKTRUM_PWR_ENABLED 0
|
||||
|
||||
# Spektrum RC Input pin, used as GPIO for bind for Satellite Receivers
|
||||
PB0 SPEKTRUM_RC INPUT PULLUP GPIO(71)
|
||||
define HAL_GPIO_SPEKTRUM_RC 71
|
||||
|
||||
# Order of I2C buses
|
||||
I2C_ORDER I2C1 I2C3 I2C4
|
||||
|
||||
# this board has no internal I2C buses so mark them all external
|
||||
define HAL_I2C_INTERNAL_MASK 0
|
||||
|
||||
# order of UARTs and suggested uses
|
||||
# USART2 TELEM1
|
||||
# USART3 TELEM2
|
||||
# UART4 GPS
|
||||
# UART8 GPS2
|
||||
# UART7 DEBUG
|
||||
|
||||
# USART6 RC input (Only RX pin is connected)
|
||||
|
||||
# OTG1 and OTG2 are USB devices (1x physical USB connection enumerated as 2x logical ports)
|
||||
|
||||
SERIAL_ORDER OTG1 USART2 USART3 UART4 UART8 UART7 USART6 OTG2
|
||||
|
||||
# Another USART, this one for telem1. This one has RTS and CTS lines.
|
||||
# USART2 telem1
|
||||
PD5 USART2_TX USART2
|
||||
PD6 USART2_RX USART2
|
||||
PD3 USART2_CTS USART2
|
||||
PD4 USART2_RTS USART2
|
||||
|
||||
# The telem2 USART, with RTS and CTS lines.
|
||||
# USART3 telem2
|
||||
PD8 USART3_TX USART3
|
||||
PD9 USART3_RX USART3
|
||||
PD11 USART3_CTS USART3
|
||||
PD12 USART3_RTS USART3
|
||||
|
||||
# UART4 GPS
|
||||
PA0 UART4_TX UART4
|
||||
PA1 UART4_RX UART4
|
||||
|
||||
# UART7
|
||||
PE8 UART7_TX UART7 NODMA
|
||||
PE7 UART7_RX UART7 NODMA
|
||||
|
||||
# USART6
|
||||
PG14 USART6_TX USART6
|
||||
PG9 USART6_RX USART6
|
||||
PG13 USART6_CTS USART6
|
||||
PG12 USART6_RTS USART6
|
||||
|
||||
# UART8 GPS2
|
||||
PE1 UART8_TX UART8
|
||||
PE0 UART8_RX UART8
|
||||
|
||||
# RSSI Analog Input
|
||||
PC1 RSSI_IN ADC1
|
||||
|
||||
# Safety Switch Input
|
||||
PC4 SAFETY_IN INPUT PULLDOWN
|
||||
define HAL_HAVE_SAFETY_SWITCH 1
|
||||
|
||||
# Battery Analog Sense Pins
|
||||
PA2 BATT_VOLTAGE_SENS ADC1 SCALE(1)
|
||||
PA3 BATT_CURRENT_SENS ADC1 SCALE(1)
|
||||
|
||||
# Now the VDD sense pin. This is used to sense primary board voltage.
|
||||
PA4 VDD_5V_SENS ADC1 SCALE(2)
|
||||
|
||||
# Now setup the default battery pins driver analog pins and default
|
||||
# scaling for the power brick (Adjusted for Power Zero - M10077).
|
||||
define HAL_BATT_VOLT_PIN 14
|
||||
define HAL_BATT_CURR_PIN 15
|
||||
define HAL_BATT_VOLT_SCALE 15.3
|
||||
define HAL_BATT_CURR_SCALE 50.0
|
||||
|
||||
#SPI1 ICM_20602 / ICM_20948
|
||||
PA5 SPI1_SCK SPI1
|
||||
PA6 SPI1_MISO SPI1
|
||||
PA7 SPI1_MOSI SPI1
|
||||
|
||||
#SPI2 FRAM / DPS310
|
||||
PB10 SPI2_SCK SPI2
|
||||
PB14 SPI2_MISO SPI2
|
||||
PB15 SPI2_MOSI SPI2
|
||||
|
||||
#SPI5 BMI088
|
||||
PF7 SPI5_SCK SPI5
|
||||
PF8 SPI5_MISO SPI5
|
||||
PF9 SPI5_MOSI SPI5
|
||||
|
||||
#SPI6 External
|
||||
#PG13 SPI6_SCK SPI6
|
||||
#PG12 SPI6_MISO SPI6
|
||||
#PG14 SPI6_MOSI SPI6
|
||||
|
||||
# This is the pin that senses USB being connected. It is an input pin
|
||||
# setup as OPENDRAIN.
|
||||
PA9 VBUS INPUT OPENDRAIN
|
||||
|
||||
# This input pin is used to detect that power is valid on USB.
|
||||
PC0 VBUS_VALID INPUT PULLDOWN
|
||||
|
||||
# Now we define the pins that USB is connected on.
|
||||
PA11 OTG_FS_DM OTG1
|
||||
PA12 OTG_FS_DP OTG1
|
||||
|
||||
# These are the pins for SWD debugging with a STlinkv2 or black-magic probe.
|
||||
PA13 JTMS-SWDIO SWD
|
||||
PA14 JTCK-SWCLK SWD
|
||||
|
||||
# PWM output for buzzer
|
||||
PA15 TIM2_CH1 TIM2 GPIO(77) ALARM
|
||||
|
||||
# First I2C bus.
|
||||
PB8 I2C1_SCL I2C1
|
||||
PB9 I2C1_SDA I2C1
|
||||
|
||||
# Second I2C bus.
|
||||
PH7 I2C3_SCL I2C3
|
||||
PH8 I2C3_SDA I2C3
|
||||
|
||||
# Third I2C bus.
|
||||
PB6 I2C4_SCL I2C4
|
||||
PB7 I2C4_SDA I2C4
|
||||
|
||||
# microSD card
|
||||
PC8 SDMMC1_D0 SDMMC1
|
||||
PC9 SDMMC1_D1 SDMMC1
|
||||
PC10 SDMMC1_D2 SDMMC1
|
||||
PC11 SDMMC1_D3 SDMMC1
|
||||
PC12 SDMMC1_CK SDMMC1
|
||||
PD2 SDMMC1_CMD SDMMC1
|
||||
|
||||
# CS pins for SPI sensors. The labels for all CS pins need to
|
||||
# match the SPI device table later in this file.
|
||||
PC2 ICM_20602_CS CS
|
||||
PD7 BARO_CS CS
|
||||
PD10 FRAM_CS CS SPEED_VERYLOW NODMA
|
||||
PE15 ICM_20948_CS CS
|
||||
PF6 BMI088_ACCEL_CS CS
|
||||
PF10 BMI088_GYRO_CS CS
|
||||
#PG9 EXTERNAL CS
|
||||
|
||||
# CAN Busses
|
||||
PD0 CAN1_RX CAN1
|
||||
PD1 CAN1_TX CAN1
|
||||
|
||||
PB13 CAN2_TX CAN2
|
||||
PB12 CAN2_RX CAN2
|
||||
|
||||
# CAN Silent Pins LOW Enable
|
||||
PF5 GPIO_CAN_SILENT OUTPUT PUSHPULL SPEED_LOW LOW GPIO(72)
|
||||
|
||||
# Now we start defining some PWM pins. We also map these pins to GPIO
|
||||
# values, so users can set BRD_PWM_COUNT to choose how many of the PWM
|
||||
# outputs on the primary MCU are setup as PWM and how many as
|
||||
# GPIOs. To match HAL_PX4 we number the GPIOs for the PWM outputs
|
||||
# starting at 50.
|
||||
PE14 TIM1_CH4 TIM1 PWM(1) GPIO(50) BIDIR
|
||||
PE13 TIM1_CH3 TIM1 PWM(2) GPIO(51)
|
||||
PE11 TIM1_CH2 TIM1 PWM(3) GPIO(52) BIDIR
|
||||
PE9 TIM1_CH1 TIM1 PWM(4) GPIO(53)
|
||||
PD13 TIM4_CH2 TIM4 PWM(5) GPIO(54) BIDIR
|
||||
PD14 TIM4_CH3 TIM4 PWM(6) GPIO(55) BIDIR
|
||||
PI5 TIM8_CH1 TIM8 PWM(7) GPIO(56) BIDIR
|
||||
PI6 TIM8_CH2 TIM8 PWM(8) GPIO(57)
|
||||
|
||||
# This is the invensense 20602 data-ready pin.
|
||||
PD15 MPU_DRDY INPUT
|
||||
|
||||
# Power Supply Enable
|
||||
PE3 VDD_1V8_3V3_SENSORS_EN OUTPUT HIGH
|
||||
|
||||
# Power Supply Enable 3.3v Periph/Spektrum
|
||||
PC5 VDD_3V3_PERIPH_EN OUTPUT HIGH
|
||||
|
||||
# Power flag pins: these tell the MCU the status of the various power
|
||||
# supplies that are available. The pin names need to exactly match the
|
||||
# names used in AnalogIn.cpp.
|
||||
PB5 VDD_BRICK_VALID INPUT PULLDOWN
|
||||
|
||||
SPIDEV dps310 SPI2 DEVID3 BARO_CS MODE3 5*MHZ 5*MHZ
|
||||
SPIDEV ramtron SPI2 DEVID10 FRAM_CS MODE3 8*MHZ 8*MHZ
|
||||
SPIDEV bmi088_g SPI5 DEVID1 BMI088_GYRO_CS MODE3 10*MHZ 10*MHZ
|
||||
SPIDEV bmi088_a SPI5 DEVID2 BMI088_ACCEL_CS MODE3 10*MHZ 10*MHZ
|
||||
SPIDEV icm20608 SPI1 DEVID2 ICM_20602_CS MODE3 2*MHZ 7*MHZ
|
||||
SPIDEV icm20948 SPI1 DEVID1 ICM_20948_CS MODE3 2*MHZ 7*MHZ
|
||||
|
||||
# Enable RAMTROM parameter storage.
|
||||
define HAL_WITH_RAMTRON 1
|
||||
|
||||
# Enable FAT filesystem support (needs a microSD defined via SDMMC).
|
||||
define HAL_OS_FATFS_IO 1
|
||||
|
||||
# Control Zero has a TriColor LED, Red, Green, Blue
|
||||
define HAL_HAVE_PIXRACER_LED
|
||||
|
||||
# LED setup for PixracerLED driver
|
||||
PB11 LED_R OUTPUT HIGH GPIO(0)
|
||||
PB1 LED_G OUTPUT HIGH GPIO(1)
|
||||
PB3 LED_B OUTPUT HIGH GPIO(2)
|
||||
|
||||
define HAL_GPIO_A_LED_PIN 0
|
||||
define HAL_GPIO_B_LED_PIN 1
|
||||
define HAL_GPIO_C_LED_PIN 2
|
||||
|
||||
# DMA_PRIORITY SDMMC*
|
||||
DMA_NOSHARE SPI1* SPI5*
|
||||
|
||||
# 3 IMUs
|
||||
IMU BMI088 SPI:bmi088_a SPI:bmi088_g ROTATION_NONE
|
||||
IMU Invensense SPI:icm20608 ROTATION_ROLL_180_YAW_90
|
||||
IMU Invensensev2 SPI:icm20948 ROTATION_ROLL_180_YAW_90
|
||||
|
||||
define HAL_DEFAULT_INS_FAST_SAMPLE 7
|
||||
|
||||
# 1 baro
|
||||
BARO DPS280 SPI:dps310
|
||||
|
||||
# 1 compass
|
||||
COMPASS AK09916:probe_ICM20948 0 ROTATION_ROLL_180
|
||||
define HAL_PROBE_EXTERNAL_I2C_COMPASSES
|
||||
|
|
@ -86,6 +86,8 @@
|
|||
#define STM32_PWR_CR2 (PWR_CR2_BREN)
|
||||
#ifdef SMPS_PWR
|
||||
#define STM32_PWR_CR3 (PWR_CR3_SMPSEN | PWR_CR3_USB33DEN)
|
||||
#elif defined(SMPS_EXT)
|
||||
#define STM32_PWR_CR3 (PWR_CR3_BYPASS | PWR_CR3_USB33DEN)
|
||||
#else
|
||||
#define STM32_PWR_CR3 (PWR_CR3_LDOEN | PWR_CR3_USB33DEN)
|
||||
#endif
|
||||
|
|
|
|||
Loading…
Reference in New Issue