diff --git a/libraries/AP_HAL_ChibiOS/hwdef/RadiolinkPIX6/RadiolinkPIX6.png b/libraries/AP_HAL_ChibiOS/hwdef/RadiolinkPIX6/RadiolinkPIX6.png
new file mode 100644
index 0000000000..0c70a1390b
Binary files /dev/null and b/libraries/AP_HAL_ChibiOS/hwdef/RadiolinkPIX6/RadiolinkPIX6.png differ
diff --git a/libraries/AP_HAL_ChibiOS/hwdef/RadiolinkPIX6/Readme.md b/libraries/AP_HAL_ChibiOS/hwdef/RadiolinkPIX6/Readme.md
new file mode 100644
index 0000000000..173b0317e7
--- /dev/null
+++ b/libraries/AP_HAL_ChibiOS/hwdef/RadiolinkPIX6/Readme.md
@@ -0,0 +1,296 @@
+# RadiolinkPIX6 Flight Controller
+
+
+
+Featuring STM32F7 cpu, vibration isolation of IMUs, redundant IMUs, integrated OSD chip, IMU heating, and DShot.
+
+## Specifications
+
+- Processor
+ - 32-bit ARM Cortex M7 core with DPFPU - STM32F765VIT6
+ - 216 MHz/512 KB RAM/2 MB Flash
+ - 32-bit IOMCU co-processor - STM32F100
+ - 32KB FRAM - FM25V02A
+ - AT7456E OSD
+- Sensors
+ - Bosh BMI088 IMU (accel, gyro)
+ - InvenSense ICM-42688 IMU (accel, gyro)
+ - SPL06 barometer
+ - IST8310 magnetometer
+- Power
+ - SMBUS/I2C Power Module Inputs(I2C)
+ - voltage and current monitor inputs(Analog)
+- Interfaces
+ - 16 PWM Outputs with independent power rail for external power source
+ - 5x UART serial ports, 2 with HW flow control
+ - Camera Input and Video Output
+ - PPM/SBUS input, DSM/SBUS input
+ - RSSI (PWM or voltage) input
+ - I2C, SPI, 2x CAN, USB
+ - 3.3V and 6.6V ADC inputs
+ - Buzzer and Safety Switch
+ - microSD card
+- Dimensions
+ - Weight 80g
+ - Size 94mm x 51.5mm x 14.5mm
+
+## Connector assignments
+
+### Top View
+
+  +
+### Left View
+
+
+
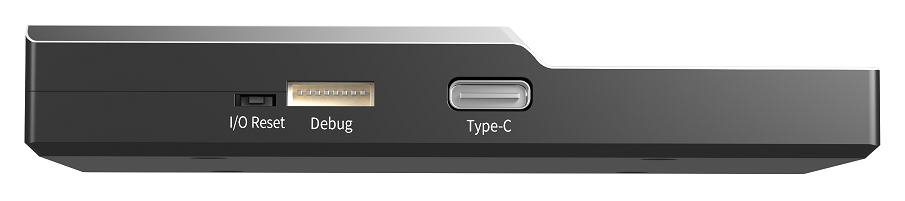
+### Left View
+
+  +
+ ### Right View
+
+
+
+ ### Right View
+
+  +
+### Rear View
+
+
+
+### Rear View
+
+  +
+## Pinouts
+
+### TELEM1, TELEM2 ports
+
+| Pin | Signal | Volt |
+| ---- | ------- | ----- |
+| 1 | VCC | +5V |
+| 2 | TX(OUT) | +3.3V |
+| 3 | RX(IN) | +3.3V |
+| 4 | CTS | +3.3V |
+| 5 | RTS | +3.3V |
+| 6 | GND | GND |
+
+### OSD
+
+| Pin | Signal | Volt |
+| ---------------------------------------------------------- | ------------------------------------------------------------ | ------------------------------------------------------------ |
+| 1 | GND | GND |
+| 2 | VOUT | +3.3V |
+| 3 | VCC | +5V |
+| 4 | GND | GND |
+| 5 | VCC | +5V |
+| 6 | VIN | +3.3V |
+
+### I2C port
+
+| Pin | Signal | Volt |
+| ---------------------------------------------------------- | ------------------------------------------------------------ | ------------------------------------------------------------ |
+| 1 | VCC | +5V |
+| 2 | SCL | +3.3V (pullups) |
+| 3 | SDA | +3.3V (pullups) |
+| 4 | GND | GND |
+
+### CAN1, CAN2 ports
+
+| Pin | Signal | Volt |
+| ---------------------------------------------------------- | ------------------------------------------------------------ | ------------------------------------------------------------ |
+| 1 | VCC | +5V |
+| 2 | CAN_H | +12V |
+| 3 | CAN_L | +12V |
+| 4 | GND | GND |
+
+### GPS1 port
+
+| Pin | Signal | Volt |
+| ---------------------------------------------------------- | ------------------------------------------------------------ | ------------------------------------------------------------ |
+| 1 | VCC | +5V |
+| 2 | TX(OUT) | +3.3V |
+| 3 | RX(IN) | +3.3V |
+| 4 | SCL | +3.3V |
+| 5 | SDA | +3.3V |
+| 6 | GND | GND |
+
+### GPS2 Port
+
+| Pin | Signal | Volt |
+| ---------------------------------------------------------- | ------------------------------------------------------------ | ------------------------------------------------------------ |
+| 1 | VCC | +5V |
+| 2 | TX(OUT) | +3.3V |
+| 3 | RX(IN) | +3.3V |
+| 4 | SCL | +3.3V |
+| 5 | SDA | +3.3V |
+| 6 | GND | GND |
+
+### SPI
+
+| Pin | Signal | Volt |
+| ---------------------------------------------------------- | ------------------------------------------------------------ | ------------------------------------------------------------ |
+| 1 | VCC | +5V |
+| 2 | SPI_SCK | +3.3V |
+| 3 | SPI_MISO | +3.3V |
+| 4 | SPI_MOSI | +3.3V |
+| 5 | !SPI_NSS1 | +3.3V |
+| 6 | !SPI_NSS2 | +3.3V |
+| 7 | DRDY | +3.3V |
+| 8 | GND | GND |
+
+### POWER1
+
+| Pin | Signal | Volt |
+| ---------------------------------------------------------- | ------------------------------------------------------------ | ------------------------------------------------------------ |
+| 1 | VCC | +5V |
+| 2 | VCC | +5V |
+| 3 | CURRENT | up to +3.3V |
+| 4 | VOLTAGE | up to +3.3V |
+| 5 | GND | GND |
+| 6 | GND | GND |
+
+### POWER2
+
+| Pin | Signal | Volt |
+| ---------------------------------------------------------- | ------------------------------------------------------------ | ------------------------------------------------------------ |
+| 1 | VCC | +5V |
+| 2 | VCC | +5V |
+| 3 | SCL | +3.3V |
+| 4 | SDA | +3.3V |
+| 5 | GND | GND |
+| 6 | GND | GND |
+
+### ADC 3.3V
+
+| Pin | Signal | Volt |
+| ---------------------------------------------------------- | ------------------------------------------------------------ | ------------------------------------------------------------ |
+| 1 | VCC | +5V |
+| 2 | ADC IN1 | up to +3.3V |
+| 3 | GND | GND |
+| 4 | ADC IN2 | up to +3.3v |
+| 5 | GND | GND |
+
+### ADC 6.6V
+
+| Pin | Signal | Volt |
+| ---------------------------------------------------------- | ------------------------------------------------------------ | ------------------------------------------------------------ |
+| 1 | VCC | +5V |
+| 2 | ADC IN | up to 6.6V |
+| 3 | GND | GND |
+
+### USB remote port
+
+| Pin | Signal | Volt |
+| ---------------------------------------------------------- | ------------------------------------------------------------ | ------------------------------------------------------------ |
+| 1 | USB VDD | +5V |
+| 2 | DM | +3.3V |
+| 3 | DP | +3.3V |
+| 4 | GND | GND |
+
+### SWITCH
+
+| Pin | Signal | Volt |
+| ---------------------------------------------------------- | ------------------------------------------------------------ | ------------------------------------------------------------ |
+| 1 | VCC | +3.3V |
+| 2 | !IO_LED_SAFETY | GND |
+| 3 | SAFETY | GND |
+
+### Buzzer port
+
+| Pin | Signal | Volt |
+| ---------------------------------------------------------- | ------------------------------------------------------------ | ------------------------------------------------------------ |
+| 1 | VCC | +5V |
+| 2 | BUZZER- | +5V |
+
+### Spektrum/DSM Port
+
+| Pin | Signal | Volt |
+| ---------------------------------------------------------- | ------------------------------------------------------------ | ------------------------------------------------------------ |
+| 1 | VCC | +3.3V |
+| 2 | GND | GND |
+| 3 | Signal | +3.3V |
+
+### Debug port
+
+| Pin | Signal | Volt |
+| ---------------------------------------------------------- | ------------------------------------------------------------ | ------------------------------------------------------------ |
+| 1 | VCC | +5V |
+| 2 | FMU_SWCLK | +3.3V |
+| 3 | FMU_SWDIO | +3.3V |
+| 4 | TX(UART7) | +3.3V |
+| 5 | RX(UART7) | +3.3V |
+| 6 | IO_SWCLK | +3.3V |
+| 7 | IO_SWDIO | +3.3V |
+| 8 | GND | GND |
+
+## UART Mapping
+
+- SERIAL0 -> USB
+- SERIAL1 -> USART2 (Telem1) RTS/CTS pins, RX DMA capable
+- SERIAL2 -> USART3 (Telem2) RTS/CTS pins, TX/RX DMA capable
+- SERIAL3 -> USART1 (GPS1), TX/RX DMA capable
+- SERIAL4 -> UART4 (GPS2), No DMA
+- SERIAL5 -> UART7 (User), No DMA
+
+## RC Input
+
+The RCIN pin, which by default is mapped to a timer input, can be used for all ArduPilot supported receiver protocols, except CRSF/ELRS and SRXL2 which require a true UART connection. However, FPort, when connected in this manner, will only provide RC without telemetry.
+
+To allow CRSF and embedded telemetry available in Fport, CRSF, and SRXL2 receivers, a full UART, such as SERIAL1 (USART2) would need to be used for receiver connections. Below are setups using Serial6.
+
+- [SERIAL1_PROTOCOL](https://ardupilot.org/copter/docs/parameters.html#serial1-protocol) should be set to “23”.
+- FPort would require [SERIAL1_OPTIONS](https://ardupilot.org/copter/docs/parameters.html#serial1-options) be set to “15”.
+- CRSF would require [SERIAL1_OPTIONS](https://ardupilot.org/copter/docs/parameters.html#serial1-options) be set to “0”.
+- SRXL2 would require [SERIAL1_OPTIONS](https://ardupilot.org/copter/docs/parameters.html#serial1-options) be set to “4” and connects only the TX pin.
+
+Any UART can be used for RC system connections in ArduPilot also, and is compatible with all protocols except PPM. See [Radio Control Systems](https://ardupilot.org/copter/docs/common-rc-systems.html#common-rc-systems) for details.
+
+## OSD Support
+
+The RadiolinkPIX6 support using its internal OSD using OSD_TYPE 1 (MAX7456 driver). External OSD support such as DJI or DisplayPort is supported using UART3 or any other free UART. See [MSP OSD](https://ardupilot.org/copter/docs/common-msp-osd-overview-4.2.html#common-msp-osd-overview-4-2) for more info.
+
+## PWM Output
+
+The RadiolinkPIX6 supports up to 16 PWM outputs. All 16 outputs support all normal PWM output formats. All FMU outputs also support DShot.
+
+The 8 FMU PWM outputs are in 4 groups:
+
+- Outputs 1, 2, 3 and 4 in group1
+- Outputs 5 and 8 in group2
+- Outputs 6 and 7 in group3
+
+FMU outputs within the same group need to use the same output rate and protocol. If any output in a group uses DShot then all channels in that group need to use DShot.
+
+## Battery Monitoring
+
+The board has 2 dedicated power monitor ports with a 6 pin connector. One is the Analog power monitor(Power1), and the others is the I2C power monitor(Power2).
+
+### Power1 port(Analog)
+
+The parameters should be set:
+
+[BATT_MONITOR](https://ardupilot.org/copter/docs/parameters.html#batt-monitor) =4
+
+[BATT_VOLT_PIN](https://ardupilot.org/copter/docs/parameters.html#batt-volt-pin) 2
+
+[BATT_CURR_PIN](https://ardupilot.org/copter/docs/parameters.html#batt-curr-pin) 5
+
+[BATT_VOLT_MULT](https://ardupilot.org/copter/docs/parameters.html#batt-volt-mult) 18
+
+[BATT_AMP_PERVLT](https://ardupilot.org/copter/docs/parameters.html#batt-amp-pervlt) 24
+
+### Power2 port(I2C)
+
+The parameters should be set.:
+
+- [BATT_MONITOR](https://ardupilot.org/copter/docs/parameters.html#batt-monitor) = 21
+- [BATT_I2C_BUS](https://ardupilot.org/copter/docs/parameters.html#batt-i2c-bus-ap-battmonitor-ina2xx) = 1
+- [BATT_I2C_ADDR](https://ardupilot.org/copter/docs/parameters.html#batt-i2c-addr-ap-battmonitor-ina2xx) = 65
+
+## Compass
+
+The RadiolinkPIX6 has a built-in compass. Due to potential interference, the autopilot is usually used with an external I2C compass as part of a GPS/Compass combination.
+
+## Analog inputs
+
+The RadiolinkPIX6 has 3 analog inputs, one 6V tolerant and two 3.3V tolerant
+
+ - ADC Pin12 -> ADC 6.6V Sense
+ - ADC Pin4 -> ADC IN1 3.3V Sense
+ - ADC Pin13 -> ADC IN2 3.3V Sense
+ - Analog 3.3V RSSI input pin = 103
+
+## Connectors
+
+Unless noted otherwise all connectors are JST GH
\ No newline at end of file
diff --git a/libraries/AP_HAL_ChibiOS/hwdef/RadiolinkPIX6/hwdef-bl.dat b/libraries/AP_HAL_ChibiOS/hwdef/RadiolinkPIX6/hwdef-bl.dat
new file mode 100644
index 0000000000..dd803b77df
--- /dev/null
+++ b/libraries/AP_HAL_ChibiOS/hwdef/RadiolinkPIX6/hwdef-bl.dat
@@ -0,0 +1,42 @@
+# hw definition file for processing by chibios_hwdef.py
+# for F765 bootloader
+
+# MCU class and specific type
+MCU STM32F7xx STM32F767xx
+
+# crystal frequency
+OSCILLATOR_HZ 24000000
+
+# board ID for firmware load
+APJ_BOARD_ID 1410
+
+FLASH_SIZE_KB 2048
+
+# bootloader is installed at zero offset
+FLASH_RESERVE_START_KB 0
+
+# the location where the bootloader will put the firmware
+FLASH_BOOTLOADER_LOAD_KB 32
+
+PC13 LED_BOOTLOADER OUTPUT HIGH
+PC7 LED_ACTIVITY OUTPUT HIGH
+define HAL_LED_ON 0
+
+
+# order of UARTs (and USB)
+SERIAL_ORDER OTG1 USART2 UART7
+
+# USART2 is telem1
+PD6 USART2_RX USART2
+PD5 USART2_TX USART2
+PD3 USART2_CTS USART2
+PD4 USART2_RTS USART2
+
+PF6 UART7_RX UART7 NODMA
+PE8 UART7_TX UART7 NODMA
+
+PA11 OTG_FS_DM OTG1
+PA12 OTG_FS_DP OTG1
+
+PA13 JTMS-SWDIO SWD
+PA14 JTCK-SWCLK SWD
diff --git a/libraries/AP_HAL_ChibiOS/hwdef/RadiolinkPIX6/hwdef.dat b/libraries/AP_HAL_ChibiOS/hwdef/RadiolinkPIX6/hwdef.dat
new file mode 100644
index 0000000000..abd4155c17
--- /dev/null
+++ b/libraries/AP_HAL_ChibiOS/hwdef/RadiolinkPIX6/hwdef.dat
@@ -0,0 +1,240 @@
+# hw definition file for processing by chibios_hwdef.py
+# for the RadiolinkPIX6 hardware
+
+# MCU class and specific type.
+MCU STM32F7xx STM32F767xx
+
+# crystal frequency
+OSCILLATOR_HZ 24000000
+
+# board ID for firmware load
+APJ_BOARD_ID 1410
+
+FLASH_RESERVE_START_KB 32
+
+# flash size
+FLASH_SIZE_KB 2048
+
+# ChibiOS system timer
+STM32_ST_USE_TIMER 5
+
+# order of UARTs (and USB)
+SERIAL_ORDER OTG1 USART2 USART3 USART1 UART4 UART7 OTG2
+
+# default the 2nd interface to MAVLink2 until MissionPlanner updates drivers
+define HAL_OTG2_PROTOCOL SerialProtocol_MAVLink2
+
+# now we define the pins that USB is connected on
+PA11 OTG_FS_DM OTG1
+PA12 OTG_FS_DP OTG1
+
+# these are the pins for SWD debugging with a STlinkv2 or black-magic probe
+PA13 JTMS-SWDIO SWD
+PA14 JTCK-SWCLK SWD
+
+# SPI1 - internal sensors
+PB3 SPI1_SCK SPI1
+PA6 SPI1_MISO SPI1
+PD7 SPI1_MOSI SPI1
+
+# SPI2 - FRAM
+PA9 SPI2_SCK SPI2
+PB14 SPI2_MISO SPI2
+PB15 SPI2_MOSI SPI2
+
+# SPI4 - sensors2
+PE2 SPI4_SCK SPI4
+PE13 SPI4_MISO SPI4
+PE6 SPI4_MOSI SPI4
+
+# sensor CS
+PB12 BMI088_A_CS CS
+PB4 ICM42688_CS CS SPEED_VERYLOW
+PD10 FRAM_CS CS SPEED_VERYLOW
+PA8 AT7456_CS CS
+PE12 BMI088_G_CS CS
+PC14 EXTERNAL1_CS1 CS
+PC15 EXTERNAL1_CS2 CS
+
+# I2C buses
+
+PB8 I2C1_SCL I2C1
+PB9 I2C1_SDA I2C1
+
+PB10 I2C2_SCL I2C2
+PB11 I2C2_SDA I2C2
+
+# order of I2C buses
+I2C_ORDER I2C1 I2C2
+
+# enable pins
+PE3 VDD_3V3_SENSORS_EN OUTPUT HIGH
+
+# start peripheral power off, then enable after init
+# this prevents a problem with radios that use RTS for
+# bootloader hold
+PD13 nVDD_5V_HIPOWER_EN OUTPUT HIGH
+PC4 nVDD_5V_PERIPH_EN OUTPUT HIGH
+
+# drdy pins
+PD15 DRDY7_EXTERNAL1 INPUT
+
+# Control of Spektrum power pin
+PE4 SPEKTRUM_PWR OUTPUT HIGH GPIO(73)
+define HAL_GPIO_SPEKTRUM_PWR 73
+
+# Spektrum Power is Active High
+define HAL_SPEKTRUM_PWR_ENABLED 1
+
+# UARTs
+
+# USART2 is telem1
+PD6 USART2_RX USART2
+PD5 USART2_TX USART2
+PD3 USART2_CTS USART2
+PD4 USART2_RTS USART2
+
+# USART1 is GPS1
+PB7 USART1_RX USART1
+PB6 USART1_TX USART1
+
+# USART3 is telem2
+PD9 USART3_RX USART3
+PD8 USART3_TX USART3
+PD11 USART3_CTS USART3
+PD12 USART3_RTS USART3
+
+# UART4 GPS2
+PA1 UART4_RX UART4 NODMA
+PA0 UART4_TX UART4 NODMA
+
+# UART7 is debug
+PE7 UART7_RX UART7 NODMA
+PE8 UART7_TX UART7 NODMA
+
+# UART8 is for IOMCU
+PE0 UART8_RX UART8
+PE1 UART8_TX UART8
+
+# UART for IOMCU
+IOMCU_UART UART8
+
+# PWM AUX channels
+PE14 TIM1_CH4 TIM1 PWM(1) GPIO(50)
+PA10 TIM1_CH3 TIM1 PWM(2) GPIO(51)
+PE11 TIM1_CH2 TIM1 PWM(3) GPIO(52)
+PE9 TIM1_CH1 TIM1 PWM(4) GPIO(53)
+PA15 TIM2_CH1 TIM2 PWM(5) GPIO(54)
+PA7 TIM3_CH2 TIM3 PWM(6) GPIO(55)
+PC6 TIM3_CH1 TIM3 PWM(7) GPIO(56)
+PA3 TIM2_CH4 TIM2 PWM(8) GPIO(57)
+
+# PWM output for buzzer
+PE5 TIM9_CH1 TIM9 GPIO(77) ALARM
+
+# analog in
+PA2 BATT_VOLTAGE_SENS ADC1 SCALE(1)
+PA5 BATT_CURRENT_SENS ADC1 SCALE(1)
+
+PC3 SPARE1_ADC1 ADC1 SCALE(1)
+PA4 SPARE2_ADC1 ADC1 SCALE(1)
+
+PC0 VDD_5V_SENS ADC1 SCALE(2)
+PC2 SCALED_V3V3 ADC1 SCALE(2)
+
+# setup scaling defaults for PixHackV5 power brick
+define HAL_BATT_VOLT_SCALE 18.0
+define HAL_BATT_CURR_SCALE 24.0
+define HAL_BATT_VOLT_PIN 0
+define HAL_BATT_CURR_PIN 1
+
+# CAN bus
+PD0 CAN1_RX CAN1
+PD1 CAN1_TX CAN1
+
+PB5 CAN2_RX CAN2
+PB13 CAN2_TX CAN2
+
+# GPIOs
+PC5 VDD_BRICK_nVALID INPUT PULLUP
+PB1 VDD_BRICK2_nVALID INPUT PULLUP
+PB2 VBUS_nVALID INPUT PULLUP
+PE10 VDD_5V_HIPOWER_nOC INPUT PULLUP
+PE15 VDD_5V_PERIPH_nOC INPUT PULLUP
+
+
+# SPI devices
+SPIDEV bmi088_a SPI1 DEVID2 BMI088_A_CS MODE3 10*MHZ 10*MHZ
+SPIDEV bmi088_g SPI1 DEVID1 BMI088_G_CS MODE3 10*MHZ 10*MHZ
+SPIDEV imu2 SPI1 DEVID3 ICM42688_CS MODE3 2*MHZ 8*MHZ
+SPIDEV osd SPI2 DEVID2 AT7456_CS MODE0 10*MHZ 10*MHZ
+SPIDEV ramtron SPI2 DEVID1 FRAM_CS MODE3 8*MHZ 8*MHZ
+
+# up to 2 IMUs
+IMU Invensensev3 SPI:imu2 ROTATION_YAW_90
+
+IMU BMI088 SPI:bmi088_a SPI:bmi088_g ROTATION_NONE
+
+define HAL_DEFAULT_INS_FAST_SAMPLE 1
+
+# probe external I2C compasses plus some internal IST8310
+# we also probe some external IST8310 with a non-standard orientation
+define HAL_PROBE_EXTERNAL_I2C_COMPASSES
+
+# we need to stop the probe of an IST8310 as an internal compass with PITCH_180
+define HAL_COMPASS_DISABLE_IST8310_INTERNAL_PROBE
+COMPASS IST8310 I2C:ALL_INTERNAL:0x0E false ROTATION_ROLL_180
+
+# one baro
+BARO SPL06 I2C:0:0x76
+
+# microSD support
+PC8 SDMMC_D0 SDMMC1
+PC9 SDMMC_D1 SDMMC1
+PC10 SDMMC_D2 SDMMC1
+PC11 SDMMC_D3 SDMMC1
+PC12 SDMMC_CK SDMMC1
+PD2 SDMMC_CMD SDMMC1
+
+# red LED marked as B/E
+PD14 LED_RED OUTPUT GPIO(90)
+
+# green LED marked as PWR. We leave this solid on, but allow
+# for it to be controlled as a relay if needed
+PC1 LED_GREEN OUTPUT GPIO(91)
+
+# blue LED marked as ACT
+PC7 LED_BLUE OUTPUT GPIO(92)
+
+# setup for "pixracer" RGB LEDs
+define HAL_GPIO_A_LED_PIN 90
+define HAL_GPIO_B_LED_PIN 91
+define HAL_GPIO_C_LED_PIN 92
+define HAL_GPIO_LED_ON 0
+define HAL_GPIO_LED_OFF 1
+
+define HAL_HAVE_PIXRACER_LED
+
+# enable RAMTROM parameter storage
+define HAL_STORAGE_SIZE 32768
+define HAL_WITH_RAMTRON 1
+
+# allow to have have a dedicated safety switch pin
+define HAL_HAVE_SAFETY_SWITCH 1
+
+define HAL_COMPASS_AUTO_ROT_DEFAULT 2
+
+DMA_PRIORITY SDMMC* UART8* ADC* USART3_RX TIM1_UP USART2_RX USART1_RX TIM1_CH3 SPI4* SPI1_RX SPI2* TIM1_CH1 SPI1_TX TIM*
+
+# enable FAT filesystem support (needs a microSD defined via SDMMC)
+define HAL_OS_FATFS_IO 1
+
+define HAL_BOARD_LOG_DIRECTORY "/APM/LOGS"
+define HAL_BOARD_TERRAIN_DIRECTORY "/APM/TERRAIN"
+
+ROMFS io_firmware.bin Tools/IO_Firmware/iofirmware_lowpolh.bin
+
+# setup for OSD
+define OSD_ENABLED 1
+define HAL_OSD_TYPE_DEFAULT 1
+ROMFS_WILDCARD libraries/AP_OSD/fonts/font*.bin
+
+## Pinouts
+
+### TELEM1, TELEM2 ports
+
+| Pin | Signal | Volt |
+| ---- | ------- | ----- |
+| 1 | VCC | +5V |
+| 2 | TX(OUT) | +3.3V |
+| 3 | RX(IN) | +3.3V |
+| 4 | CTS | +3.3V |
+| 5 | RTS | +3.3V |
+| 6 | GND | GND |
+
+### OSD
+
+| Pin | Signal | Volt |
+| ---------------------------------------------------------- | ------------------------------------------------------------ | ------------------------------------------------------------ |
+| 1 | GND | GND |
+| 2 | VOUT | +3.3V |
+| 3 | VCC | +5V |
+| 4 | GND | GND |
+| 5 | VCC | +5V |
+| 6 | VIN | +3.3V |
+
+### I2C port
+
+| Pin | Signal | Volt |
+| ---------------------------------------------------------- | ------------------------------------------------------------ | ------------------------------------------------------------ |
+| 1 | VCC | +5V |
+| 2 | SCL | +3.3V (pullups) |
+| 3 | SDA | +3.3V (pullups) |
+| 4 | GND | GND |
+
+### CAN1, CAN2 ports
+
+| Pin | Signal | Volt |
+| ---------------------------------------------------------- | ------------------------------------------------------------ | ------------------------------------------------------------ |
+| 1 | VCC | +5V |
+| 2 | CAN_H | +12V |
+| 3 | CAN_L | +12V |
+| 4 | GND | GND |
+
+### GPS1 port
+
+| Pin | Signal | Volt |
+| ---------------------------------------------------------- | ------------------------------------------------------------ | ------------------------------------------------------------ |
+| 1 | VCC | +5V |
+| 2 | TX(OUT) | +3.3V |
+| 3 | RX(IN) | +3.3V |
+| 4 | SCL | +3.3V |
+| 5 | SDA | +3.3V |
+| 6 | GND | GND |
+
+### GPS2 Port
+
+| Pin | Signal | Volt |
+| ---------------------------------------------------------- | ------------------------------------------------------------ | ------------------------------------------------------------ |
+| 1 | VCC | +5V |
+| 2 | TX(OUT) | +3.3V |
+| 3 | RX(IN) | +3.3V |
+| 4 | SCL | +3.3V |
+| 5 | SDA | +3.3V |
+| 6 | GND | GND |
+
+### SPI
+
+| Pin | Signal | Volt |
+| ---------------------------------------------------------- | ------------------------------------------------------------ | ------------------------------------------------------------ |
+| 1 | VCC | +5V |
+| 2 | SPI_SCK | +3.3V |
+| 3 | SPI_MISO | +3.3V |
+| 4 | SPI_MOSI | +3.3V |
+| 5 | !SPI_NSS1 | +3.3V |
+| 6 | !SPI_NSS2 | +3.3V |
+| 7 | DRDY | +3.3V |
+| 8 | GND | GND |
+
+### POWER1
+
+| Pin | Signal | Volt |
+| ---------------------------------------------------------- | ------------------------------------------------------------ | ------------------------------------------------------------ |
+| 1 | VCC | +5V |
+| 2 | VCC | +5V |
+| 3 | CURRENT | up to +3.3V |
+| 4 | VOLTAGE | up to +3.3V |
+| 5 | GND | GND |
+| 6 | GND | GND |
+
+### POWER2
+
+| Pin | Signal | Volt |
+| ---------------------------------------------------------- | ------------------------------------------------------------ | ------------------------------------------------------------ |
+| 1 | VCC | +5V |
+| 2 | VCC | +5V |
+| 3 | SCL | +3.3V |
+| 4 | SDA | +3.3V |
+| 5 | GND | GND |
+| 6 | GND | GND |
+
+### ADC 3.3V
+
+| Pin | Signal | Volt |
+| ---------------------------------------------------------- | ------------------------------------------------------------ | ------------------------------------------------------------ |
+| 1 | VCC | +5V |
+| 2 | ADC IN1 | up to +3.3V |
+| 3 | GND | GND |
+| 4 | ADC IN2 | up to +3.3v |
+| 5 | GND | GND |
+
+### ADC 6.6V
+
+| Pin | Signal | Volt |
+| ---------------------------------------------------------- | ------------------------------------------------------------ | ------------------------------------------------------------ |
+| 1 | VCC | +5V |
+| 2 | ADC IN | up to 6.6V |
+| 3 | GND | GND |
+
+### USB remote port
+
+| Pin | Signal | Volt |
+| ---------------------------------------------------------- | ------------------------------------------------------------ | ------------------------------------------------------------ |
+| 1 | USB VDD | +5V |
+| 2 | DM | +3.3V |
+| 3 | DP | +3.3V |
+| 4 | GND | GND |
+
+### SWITCH
+
+| Pin | Signal | Volt |
+| ---------------------------------------------------------- | ------------------------------------------------------------ | ------------------------------------------------------------ |
+| 1 | VCC | +3.3V |
+| 2 | !IO_LED_SAFETY | GND |
+| 3 | SAFETY | GND |
+
+### Buzzer port
+
+| Pin | Signal | Volt |
+| ---------------------------------------------------------- | ------------------------------------------------------------ | ------------------------------------------------------------ |
+| 1 | VCC | +5V |
+| 2 | BUZZER- | +5V |
+
+### Spektrum/DSM Port
+
+| Pin | Signal | Volt |
+| ---------------------------------------------------------- | ------------------------------------------------------------ | ------------------------------------------------------------ |
+| 1 | VCC | +3.3V |
+| 2 | GND | GND |
+| 3 | Signal | +3.3V |
+
+### Debug port
+
+| Pin | Signal | Volt |
+| ---------------------------------------------------------- | ------------------------------------------------------------ | ------------------------------------------------------------ |
+| 1 | VCC | +5V |
+| 2 | FMU_SWCLK | +3.3V |
+| 3 | FMU_SWDIO | +3.3V |
+| 4 | TX(UART7) | +3.3V |
+| 5 | RX(UART7) | +3.3V |
+| 6 | IO_SWCLK | +3.3V |
+| 7 | IO_SWDIO | +3.3V |
+| 8 | GND | GND |
+
+## UART Mapping
+
+- SERIAL0 -> USB
+- SERIAL1 -> USART2 (Telem1) RTS/CTS pins, RX DMA capable
+- SERIAL2 -> USART3 (Telem2) RTS/CTS pins, TX/RX DMA capable
+- SERIAL3 -> USART1 (GPS1), TX/RX DMA capable
+- SERIAL4 -> UART4 (GPS2), No DMA
+- SERIAL5 -> UART7 (User), No DMA
+
+## RC Input
+
+The RCIN pin, which by default is mapped to a timer input, can be used for all ArduPilot supported receiver protocols, except CRSF/ELRS and SRXL2 which require a true UART connection. However, FPort, when connected in this manner, will only provide RC without telemetry.
+
+To allow CRSF and embedded telemetry available in Fport, CRSF, and SRXL2 receivers, a full UART, such as SERIAL1 (USART2) would need to be used for receiver connections. Below are setups using Serial6.
+
+- [SERIAL1_PROTOCOL](https://ardupilot.org/copter/docs/parameters.html#serial1-protocol) should be set to “23”.
+- FPort would require [SERIAL1_OPTIONS](https://ardupilot.org/copter/docs/parameters.html#serial1-options) be set to “15”.
+- CRSF would require [SERIAL1_OPTIONS](https://ardupilot.org/copter/docs/parameters.html#serial1-options) be set to “0”.
+- SRXL2 would require [SERIAL1_OPTIONS](https://ardupilot.org/copter/docs/parameters.html#serial1-options) be set to “4” and connects only the TX pin.
+
+Any UART can be used for RC system connections in ArduPilot also, and is compatible with all protocols except PPM. See [Radio Control Systems](https://ardupilot.org/copter/docs/common-rc-systems.html#common-rc-systems) for details.
+
+## OSD Support
+
+The RadiolinkPIX6 support using its internal OSD using OSD_TYPE 1 (MAX7456 driver). External OSD support such as DJI or DisplayPort is supported using UART3 or any other free UART. See [MSP OSD](https://ardupilot.org/copter/docs/common-msp-osd-overview-4.2.html#common-msp-osd-overview-4-2) for more info.
+
+## PWM Output
+
+The RadiolinkPIX6 supports up to 16 PWM outputs. All 16 outputs support all normal PWM output formats. All FMU outputs also support DShot.
+
+The 8 FMU PWM outputs are in 4 groups:
+
+- Outputs 1, 2, 3 and 4 in group1
+- Outputs 5 and 8 in group2
+- Outputs 6 and 7 in group3
+
+FMU outputs within the same group need to use the same output rate and protocol. If any output in a group uses DShot then all channels in that group need to use DShot.
+
+## Battery Monitoring
+
+The board has 2 dedicated power monitor ports with a 6 pin connector. One is the Analog power monitor(Power1), and the others is the I2C power monitor(Power2).
+
+### Power1 port(Analog)
+
+The parameters should be set:
+
+[BATT_MONITOR](https://ardupilot.org/copter/docs/parameters.html#batt-monitor) =4
+
+[BATT_VOLT_PIN](https://ardupilot.org/copter/docs/parameters.html#batt-volt-pin) 2
+
+[BATT_CURR_PIN](https://ardupilot.org/copter/docs/parameters.html#batt-curr-pin) 5
+
+[BATT_VOLT_MULT](https://ardupilot.org/copter/docs/parameters.html#batt-volt-mult) 18
+
+[BATT_AMP_PERVLT](https://ardupilot.org/copter/docs/parameters.html#batt-amp-pervlt) 24
+
+### Power2 port(I2C)
+
+The parameters should be set.:
+
+- [BATT_MONITOR](https://ardupilot.org/copter/docs/parameters.html#batt-monitor) = 21
+- [BATT_I2C_BUS](https://ardupilot.org/copter/docs/parameters.html#batt-i2c-bus-ap-battmonitor-ina2xx) = 1
+- [BATT_I2C_ADDR](https://ardupilot.org/copter/docs/parameters.html#batt-i2c-addr-ap-battmonitor-ina2xx) = 65
+
+## Compass
+
+The RadiolinkPIX6 has a built-in compass. Due to potential interference, the autopilot is usually used with an external I2C compass as part of a GPS/Compass combination.
+
+## Analog inputs
+
+The RadiolinkPIX6 has 3 analog inputs, one 6V tolerant and two 3.3V tolerant
+
+ - ADC Pin12 -> ADC 6.6V Sense
+ - ADC Pin4 -> ADC IN1 3.3V Sense
+ - ADC Pin13 -> ADC IN2 3.3V Sense
+ - Analog 3.3V RSSI input pin = 103
+
+## Connectors
+
+Unless noted otherwise all connectors are JST GH
\ No newline at end of file
diff --git a/libraries/AP_HAL_ChibiOS/hwdef/RadiolinkPIX6/hwdef-bl.dat b/libraries/AP_HAL_ChibiOS/hwdef/RadiolinkPIX6/hwdef-bl.dat
new file mode 100644
index 0000000000..dd803b77df
--- /dev/null
+++ b/libraries/AP_HAL_ChibiOS/hwdef/RadiolinkPIX6/hwdef-bl.dat
@@ -0,0 +1,42 @@
+# hw definition file for processing by chibios_hwdef.py
+# for F765 bootloader
+
+# MCU class and specific type
+MCU STM32F7xx STM32F767xx
+
+# crystal frequency
+OSCILLATOR_HZ 24000000
+
+# board ID for firmware load
+APJ_BOARD_ID 1410
+
+FLASH_SIZE_KB 2048
+
+# bootloader is installed at zero offset
+FLASH_RESERVE_START_KB 0
+
+# the location where the bootloader will put the firmware
+FLASH_BOOTLOADER_LOAD_KB 32
+
+PC13 LED_BOOTLOADER OUTPUT HIGH
+PC7 LED_ACTIVITY OUTPUT HIGH
+define HAL_LED_ON 0
+
+
+# order of UARTs (and USB)
+SERIAL_ORDER OTG1 USART2 UART7
+
+# USART2 is telem1
+PD6 USART2_RX USART2
+PD5 USART2_TX USART2
+PD3 USART2_CTS USART2
+PD4 USART2_RTS USART2
+
+PF6 UART7_RX UART7 NODMA
+PE8 UART7_TX UART7 NODMA
+
+PA11 OTG_FS_DM OTG1
+PA12 OTG_FS_DP OTG1
+
+PA13 JTMS-SWDIO SWD
+PA14 JTCK-SWCLK SWD
diff --git a/libraries/AP_HAL_ChibiOS/hwdef/RadiolinkPIX6/hwdef.dat b/libraries/AP_HAL_ChibiOS/hwdef/RadiolinkPIX6/hwdef.dat
new file mode 100644
index 0000000000..abd4155c17
--- /dev/null
+++ b/libraries/AP_HAL_ChibiOS/hwdef/RadiolinkPIX6/hwdef.dat
@@ -0,0 +1,240 @@
+# hw definition file for processing by chibios_hwdef.py
+# for the RadiolinkPIX6 hardware
+
+# MCU class and specific type.
+MCU STM32F7xx STM32F767xx
+
+# crystal frequency
+OSCILLATOR_HZ 24000000
+
+# board ID for firmware load
+APJ_BOARD_ID 1410
+
+FLASH_RESERVE_START_KB 32
+
+# flash size
+FLASH_SIZE_KB 2048
+
+# ChibiOS system timer
+STM32_ST_USE_TIMER 5
+
+# order of UARTs (and USB)
+SERIAL_ORDER OTG1 USART2 USART3 USART1 UART4 UART7 OTG2
+
+# default the 2nd interface to MAVLink2 until MissionPlanner updates drivers
+define HAL_OTG2_PROTOCOL SerialProtocol_MAVLink2
+
+# now we define the pins that USB is connected on
+PA11 OTG_FS_DM OTG1
+PA12 OTG_FS_DP OTG1
+
+# these are the pins for SWD debugging with a STlinkv2 or black-magic probe
+PA13 JTMS-SWDIO SWD
+PA14 JTCK-SWCLK SWD
+
+# SPI1 - internal sensors
+PB3 SPI1_SCK SPI1
+PA6 SPI1_MISO SPI1
+PD7 SPI1_MOSI SPI1
+
+# SPI2 - FRAM
+PA9 SPI2_SCK SPI2
+PB14 SPI2_MISO SPI2
+PB15 SPI2_MOSI SPI2
+
+# SPI4 - sensors2
+PE2 SPI4_SCK SPI4
+PE13 SPI4_MISO SPI4
+PE6 SPI4_MOSI SPI4
+
+# sensor CS
+PB12 BMI088_A_CS CS
+PB4 ICM42688_CS CS SPEED_VERYLOW
+PD10 FRAM_CS CS SPEED_VERYLOW
+PA8 AT7456_CS CS
+PE12 BMI088_G_CS CS
+PC14 EXTERNAL1_CS1 CS
+PC15 EXTERNAL1_CS2 CS
+
+# I2C buses
+
+PB8 I2C1_SCL I2C1
+PB9 I2C1_SDA I2C1
+
+PB10 I2C2_SCL I2C2
+PB11 I2C2_SDA I2C2
+
+# order of I2C buses
+I2C_ORDER I2C1 I2C2
+
+# enable pins
+PE3 VDD_3V3_SENSORS_EN OUTPUT HIGH
+
+# start peripheral power off, then enable after init
+# this prevents a problem with radios that use RTS for
+# bootloader hold
+PD13 nVDD_5V_HIPOWER_EN OUTPUT HIGH
+PC4 nVDD_5V_PERIPH_EN OUTPUT HIGH
+
+# drdy pins
+PD15 DRDY7_EXTERNAL1 INPUT
+
+# Control of Spektrum power pin
+PE4 SPEKTRUM_PWR OUTPUT HIGH GPIO(73)
+define HAL_GPIO_SPEKTRUM_PWR 73
+
+# Spektrum Power is Active High
+define HAL_SPEKTRUM_PWR_ENABLED 1
+
+# UARTs
+
+# USART2 is telem1
+PD6 USART2_RX USART2
+PD5 USART2_TX USART2
+PD3 USART2_CTS USART2
+PD4 USART2_RTS USART2
+
+# USART1 is GPS1
+PB7 USART1_RX USART1
+PB6 USART1_TX USART1
+
+# USART3 is telem2
+PD9 USART3_RX USART3
+PD8 USART3_TX USART3
+PD11 USART3_CTS USART3
+PD12 USART3_RTS USART3
+
+# UART4 GPS2
+PA1 UART4_RX UART4 NODMA
+PA0 UART4_TX UART4 NODMA
+
+# UART7 is debug
+PE7 UART7_RX UART7 NODMA
+PE8 UART7_TX UART7 NODMA
+
+# UART8 is for IOMCU
+PE0 UART8_RX UART8
+PE1 UART8_TX UART8
+
+# UART for IOMCU
+IOMCU_UART UART8
+
+# PWM AUX channels
+PE14 TIM1_CH4 TIM1 PWM(1) GPIO(50)
+PA10 TIM1_CH3 TIM1 PWM(2) GPIO(51)
+PE11 TIM1_CH2 TIM1 PWM(3) GPIO(52)
+PE9 TIM1_CH1 TIM1 PWM(4) GPIO(53)
+PA15 TIM2_CH1 TIM2 PWM(5) GPIO(54)
+PA7 TIM3_CH2 TIM3 PWM(6) GPIO(55)
+PC6 TIM3_CH1 TIM3 PWM(7) GPIO(56)
+PA3 TIM2_CH4 TIM2 PWM(8) GPIO(57)
+
+# PWM output for buzzer
+PE5 TIM9_CH1 TIM9 GPIO(77) ALARM
+
+# analog in
+PA2 BATT_VOLTAGE_SENS ADC1 SCALE(1)
+PA5 BATT_CURRENT_SENS ADC1 SCALE(1)
+
+PC3 SPARE1_ADC1 ADC1 SCALE(1)
+PA4 SPARE2_ADC1 ADC1 SCALE(1)
+
+PC0 VDD_5V_SENS ADC1 SCALE(2)
+PC2 SCALED_V3V3 ADC1 SCALE(2)
+
+# setup scaling defaults for PixHackV5 power brick
+define HAL_BATT_VOLT_SCALE 18.0
+define HAL_BATT_CURR_SCALE 24.0
+define HAL_BATT_VOLT_PIN 0
+define HAL_BATT_CURR_PIN 1
+
+# CAN bus
+PD0 CAN1_RX CAN1
+PD1 CAN1_TX CAN1
+
+PB5 CAN2_RX CAN2
+PB13 CAN2_TX CAN2
+
+# GPIOs
+PC5 VDD_BRICK_nVALID INPUT PULLUP
+PB1 VDD_BRICK2_nVALID INPUT PULLUP
+PB2 VBUS_nVALID INPUT PULLUP
+PE10 VDD_5V_HIPOWER_nOC INPUT PULLUP
+PE15 VDD_5V_PERIPH_nOC INPUT PULLUP
+
+
+# SPI devices
+SPIDEV bmi088_a SPI1 DEVID2 BMI088_A_CS MODE3 10*MHZ 10*MHZ
+SPIDEV bmi088_g SPI1 DEVID1 BMI088_G_CS MODE3 10*MHZ 10*MHZ
+SPIDEV imu2 SPI1 DEVID3 ICM42688_CS MODE3 2*MHZ 8*MHZ
+SPIDEV osd SPI2 DEVID2 AT7456_CS MODE0 10*MHZ 10*MHZ
+SPIDEV ramtron SPI2 DEVID1 FRAM_CS MODE3 8*MHZ 8*MHZ
+
+# up to 2 IMUs
+IMU Invensensev3 SPI:imu2 ROTATION_YAW_90
+
+IMU BMI088 SPI:bmi088_a SPI:bmi088_g ROTATION_NONE
+
+define HAL_DEFAULT_INS_FAST_SAMPLE 1
+
+# probe external I2C compasses plus some internal IST8310
+# we also probe some external IST8310 with a non-standard orientation
+define HAL_PROBE_EXTERNAL_I2C_COMPASSES
+
+# we need to stop the probe of an IST8310 as an internal compass with PITCH_180
+define HAL_COMPASS_DISABLE_IST8310_INTERNAL_PROBE
+COMPASS IST8310 I2C:ALL_INTERNAL:0x0E false ROTATION_ROLL_180
+
+# one baro
+BARO SPL06 I2C:0:0x76
+
+# microSD support
+PC8 SDMMC_D0 SDMMC1
+PC9 SDMMC_D1 SDMMC1
+PC10 SDMMC_D2 SDMMC1
+PC11 SDMMC_D3 SDMMC1
+PC12 SDMMC_CK SDMMC1
+PD2 SDMMC_CMD SDMMC1
+
+# red LED marked as B/E
+PD14 LED_RED OUTPUT GPIO(90)
+
+# green LED marked as PWR. We leave this solid on, but allow
+# for it to be controlled as a relay if needed
+PC1 LED_GREEN OUTPUT GPIO(91)
+
+# blue LED marked as ACT
+PC7 LED_BLUE OUTPUT GPIO(92)
+
+# setup for "pixracer" RGB LEDs
+define HAL_GPIO_A_LED_PIN 90
+define HAL_GPIO_B_LED_PIN 91
+define HAL_GPIO_C_LED_PIN 92
+define HAL_GPIO_LED_ON 0
+define HAL_GPIO_LED_OFF 1
+
+define HAL_HAVE_PIXRACER_LED
+
+# enable RAMTROM parameter storage
+define HAL_STORAGE_SIZE 32768
+define HAL_WITH_RAMTRON 1
+
+# allow to have have a dedicated safety switch pin
+define HAL_HAVE_SAFETY_SWITCH 1
+
+define HAL_COMPASS_AUTO_ROT_DEFAULT 2
+
+DMA_PRIORITY SDMMC* UART8* ADC* USART3_RX TIM1_UP USART2_RX USART1_RX TIM1_CH3 SPI4* SPI1_RX SPI2* TIM1_CH1 SPI1_TX TIM*
+
+# enable FAT filesystem support (needs a microSD defined via SDMMC)
+define HAL_OS_FATFS_IO 1
+
+define HAL_BOARD_LOG_DIRECTORY "/APM/LOGS"
+define HAL_BOARD_TERRAIN_DIRECTORY "/APM/TERRAIN"
+
+ROMFS io_firmware.bin Tools/IO_Firmware/iofirmware_lowpolh.bin
+
+# setup for OSD
+define OSD_ENABLED 1
+define HAL_OSD_TYPE_DEFAULT 1
+ROMFS_WILDCARD libraries/AP_OSD/fonts/font*.bin